Степень подвижности механизмов
Составив кинематическую схему механизма и определив число подвижных звеньев, число и типы кинематических пар, необходимо определить степень подвижности механизма.
Подвижность кинематической цепи – это определенность движения звеньев по отношению к одному из них – неподвижному звену, именуемому стойкой. Определенность движения звеньев предполагает строгую повторяемость их траекторий движения и является обязательным свойством кинематической цепи любого реального устройства, так как в противном случае управление устройством невозможно.
За обобщенную координату в плоских механизмах, как правило, принимают угол поворота входного звена φ и следовательно, если задавать ее изменение во времени, то можно получить вполне определенное движение звеньев такой кинематической цепи, называемой механизмом. Таким образом, количество входных звеньев определяется степенью подвижности механизма.
Понятие о степенях подвижности относится не к реальным механизмам, а к их идеализированным моделям. Идеализация состоит в том, что звенья механизма, являющиеся твёрдыми телами, считают абсолютно твёрдыми, жидкие звенья – несжимаемыми, гибкие – нерастяжимыми. Соединения звеньев (кинематические пары) также принимают идеальными (отсутствие зазоров в шарнирах, качение без скольжения во фрикционных передачах и т.п.). Для такого идеального механизма понятие «степень подвижности» равносильно принятому в теоретической механике понятию «число степенейсвободы». (Числом степеней свободы является число независимых параметров, однозначно определяющих положение всех звеньев механизма в пространстве либо на плоскости).
Степень подвижности плоских механизмов определяется по формуле П.Л. Чебышева:
где: W – степень подвижности механизма;
n – число подвижных звеньев механизма;
Р5 – число кинематических пар пятого класса;
Р4 – число кинематических пар четвёртого класса.
В кривошипно-ползунном механизме (Рис. 5) три подвижных звена:кривошип – 2, шатун – 3, ползун – 4 и три кинематические пары пятого класса: вращательные – О(1-2), А(2-3), В(3-4), и поступательная пара В * (4-1) т.е.n=3;Р5=4;Р4=0.
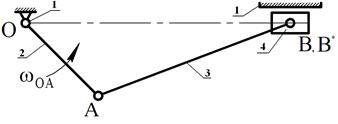
Рис.5 Схема кривошипно-ползунного механизма.
По формуле (1) получаем: W=l. В данном механизме одно входное звено.
1.8 Структурная классификация механизмов
Структурной классификацией механизмов называется разделение их на группы и классы по общности структуры.
Впервые научно обоснованная, рациональная классификация плоских механизмов была предложена в 1914 году русским учёным Л.В. Ассуром. Дальнейшее развитие структурная классификация плоских механизмов получила в работах И.И. Артоболевского.
Классификация механизмов по Ассуру-Артоболевскому позволяет для механизмов, отнесённых к одному и тому же классу, применять методику кинематического и силового анализа, разработанную специально для этого класса механизмов.
Согласно этой классификации, механизм может быть образован путём присоединения к начальному звену (или начальным звеньям) и стойке некоторых кинематических цепей.
Каждое начальное звено, входящее в кинематическую пару со стойкой (вращательную или поступательную) условно называют начальным механизмом. Начальный механизм принято считать механизмом первого класса и первого порядка.
Кинематические цепи, обладающие нулевой подвижностью относительно внешних кинематических пар и не распадающиеся на более простые цепи, удовлетворяющие этому условию, называются структурными группами Ассура.
Структурные группы Ассура не влияют на подвижность механизма, они изменяют его структуру и законы движения звеньев.
В группы Ассура входят только низшие кинематические пары, поэтому степень подвижности группы определится по формуле:
Отсюда следует, что зависимость числа кинематических пар Р5 от числа звеньев n имеет вид:
 (4)
(4)
Чтобы из механизма выделить структурные группы, необходимо помнить их основные признаки, вытекающие из определения:
а) число звеньев в группе Ассура должно быть чётным, а число кинематических пар кратно трём, (Табл.3)
Таблица 3. Соотношение числа звеньев и числа кинематических пар в группах Ассура
б) степень подвижности группы всегда равна нулю;
в) степень подвижности оставшейся части механизма при отсоединении групп Ассура не должна изменяться.
Дата добавления: 2018-03-01 ; просмотров: 8836 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Расчет подвижности плоского механизма
Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых) координат, которое должен иметь механизм для того, чтобы все его звенья имели вполне определённые движения.
Представим себе, что нам необходимо спроектировать механизм из k звеньев. Так как каждое звено, будучи свободным в плоскости, обладает тремя степенями свободы, то получим:
3k – общее количество степеней свободы всех k звеньев.
При образовании кинематической цепи звенья теряют свои степени свободы.
Кинематическая цепь – это ряд звеньев, соединенных между собой кинематическими парами. Если в кинематической цепи
p5 – количество кинематических пар 5-го класса, а каждая такая пара накладывает два условия связи на относительное движение звеньев, поэтому
2p5 – общее количество условий связи, наложенных всеми парами 5-го класса.
Пусть также в кинематической цепи
p4 – количество кинематических пар 4-го класса. Так как каждая пара 4-го класса накладывает одно условие связи, то
1p4 – общее количество условий связи, наложенных на относительное движение звеньев всеми парами 4-го класса.
Если обозначить буквой S общее количество условий связей в кинематической цепи, наложенное парами обоих классов, то
Количество степеней свободы H кинематической цепи определится разностью между числами 3k и S:
 Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Поэтому при образовании механизма одно из его звеньев должно быть сделано неподвижным (стойкой), тогда число степеней свободы механизма будет: W = H – 3, или
W = 3(k – 1) – (2 p5 + p4).
Обозначив k – 1 = n (n –количество подвижных звеньев механизма), имеем
Эта формула была получена в 1869 году академиком Петербургской Академии наук П.Л.Чебышёвым и носит название формулы Чебышёва.
Фактически W означает количество независимых движений, которые должен иметь данный механизм для получения полной определенности в движениях всех его звеньев. По существу W означает чаще всего количество ведущих звеньев механизма.
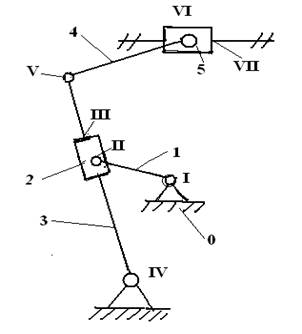
Обозначим номера подвижных звеньев данной схемы арабскими цифрами, их количество составит n = 5, римскими цифрами обозначим номера кинематических пар 5-го класса, получив их количество p5 = 7, пары 4-го класса в этом механизме отсутствуют, т. е. p4 = 0. Расчёт по формуле Чебышёва даёт
W = 3·5 – (2·7 + 1∙0) = 1
Следовательно, в этом механизме одна степень свободы, что означает необходимость выбрать одно ведущее звено для его нормального функционирования.
Дата добавления: 2016-01-29 ; просмотров: 1035 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Как посчитать число подвижных звеньев
   Обновление : 01.09.05
© EasyStudio : 01.09.05
easystd@gmail.com
Под числом степеней подвижности механизма (обозначение W ) будем понимать число независимых параметров, определяющих положение всех подвижных звеньев механизма.
      Такими параметрами являются независимые координаты, определяющие положения входных звеньев. Очевидно, число степеней подвижности будет равно числу всех входных звеньев.
      Введём обозначения следующих числовых величин:
      При q=0 механизм – статически определимая система, при q>0 – статически неопределимая система. В частном случае, если число степеней подвижности механизма W найдено из геометрических соображений, то из формулы (2.2) можно найти число избыточных связей q и решить вопрос о статической определимости механизма. Или же, зная, что механизм статически определимый можно найти W.
      Если избыточных связей нет ( q=0 ), сборка механизма происходит без деформирования звеньев, последние как бы самоустанавливаются; поэтому такие механизмы называют самоустанавливающимися [1]. Если избыточные связи есть, то сборка механизма и движение его звеньев становится возможным только при деформировании последних.
      Для плоских механизмов без избыточных связей структурная формула носит имя П. Л. Чебышева, впервые предложившего её в 1869 году для рычажных механизмов с вращательными парами и одной степенью свободы. В настоящее время формула Чебышева распространена на любые плоские механизмы и выводится с учётом избыточных связей следующим образом.
      Индекс “П” напоминает о том, что речь идёт об идеально плоском механизме, или, точнее, о его плоской схеме, поскольку за счёт неточностей изготовления плоский механизм в какой-то мере является пространственным.
      По формулам (2.2), (2.3) проводят структурный анализ имеющихся механизмов и синтез структурных схем новых механизмов.
Пассивной связью можно назвать дополнительное звено, которое не накладывает ограничений на движение механизма. Обычно она вводится для увеличения жёсткости механизма или перевода механизма через особые положения, в которых наблюдается неопределенность движения звеньев.
      В так называемом “ механизме параллельных кривошипов ” (рис. снизу а) звено 3 может изменить направление вращения при неизменном направлении вращения ведущего звена 1, когда механизм приходит в горизонтальное положение. Для того, чтобы этого избежать, в состав механизма включают дополнительное звено 4.
      При структурном анализе механизма пассивные связи не учитывают. Если по формуле степень подвижности механизма будет равна нулю, но заранее известно, что рассматриваемая цепь подвижна, то следует искать пассивные связи.
Определение степени подвижности механизма




![]()
![]()
Определение степени подвижности пространственной кинематической цепи
Пусть мы имеем n звеньев, из которых собирается кинематическая цепь. Пока звенья не соединены в кинематические пары, каждое из них имеет шесть степеней свободы (степеней подвижности). Все звенья до соединения в кинематическую цепь следовательно имели 6n степеней подвижности. После сборки звеньев в кинематическую цепь мы получим кинематические пары различных классов (с разными степенями подвижности). Предположим, что наша кинематическая цепь имеет кинематические пары всех пяти классов.
Примем следующие обозначения:
Степенью подвижности механизма называется количество независимых координат, которые необходимо задать для определения положений звеньев механизма в системе координат, жестко связанной со стойкой.
Механизм отличается от кинематической цепи тем, что у него одно звено полностью закреплено. Закрепленное звено потеряло все шесть степеней свободы. Следовательно в механизме число подвижных звеньев равно n-1. Подставив в формулу (1) количество подвижных звеньев n-1, получим формулу для определения степени подвижности механизма:
Формула (2) впервые была получена Малышевым для пространственных механизмов.
Рассмотрим формулу Малышева для определения степени подвижности плоских механизмов. Все звенья плоского механизма могут иметь три степени подвижности, а кинематические пары соответственно могут иметь 1 или 2 степени подвижности. Если плоские кинематические пары рассматривать по классам, то они могут быть только пятого и четвёртого классов. При этом необходимо учесть, что общее количество степеней подвижности всех звеньев плоского механизма равно 3(n-1). Пары пятого класса теряют две степени подвижности, четвёртого –одну. Таким образом степень подвижности плоского механизма может быть определена по формуле:
Формула (3) для определения степени подвижности плоского механизма впервые была получена Чебышевым П. Л.
В зависимости от числа общих условий связей, накладываемых на механизм, механизмы подразделяют на семейства.
Семейства механизмов и их структурные формулы приведены в таблице 1.
Таблица 2.1 Структурные формулы различных семейств механизмов
| Семейство | Структурная формула | Примечание |
| I II III IV | W=6(n-1)-5P5-4Р4-3Р3-2Р2-1P1 W=5(n-1)-4P5-3Р4-2Р3-Р2 W=4(n-1)-3P5-2Р4-Р3 W=3(n-1)-2P5-Р4 W=2(n-1)- P5 | Сомова-Малышева Чебышева Добровольского |
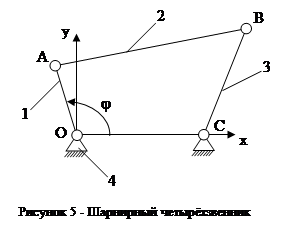
Рассмотрим применение структурной формулы Чебышева П. Л. на конкретном примере. На рисунке 5 изображен шарнирный четырёхзвенник.
Количество звеньев n = 4. Кинематические пары: 4-1, 1-2, 2-3, 3-4. Имеем 4 одноподвижные пары 5 го класса. Относительное движение всех звеньев плоское. Механизм плоский. Определяем степень подвижности его по формуле Чебышева П. Л.:
Механизм имеет степень подвижности равную 1. Это значит, что достаточно задать одну координату любому звену механизма в системе координат, жестко связанной со станиной, чтобы определить положения всех остальных звеньев. Например, в нашем случае достаточно задаться углом поворота кривошипа j1.

Пассивные связи и избыточные звенья
Звенья и кинематические пары, которые не влияют на характер движения механизма в целом, называются избыточными (лишними) звеньями и парами, а обусловленные ими связи называются пассивными связями.
При определении степени подвижности механизма избыточные звенья и кинематические пары не должны учитываться.
В сложных стержневых механизмах не всегда на глаз можно определить степень подвижности. В этих случаях необходимо воспользоваться формулой Чебышева.
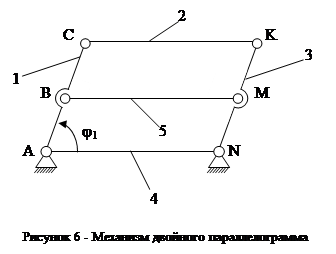
Если W=0, то должен быть не механизм, а жесткая ферма. Мы видим, что механизм может осуществлять движение. Если в этом механизме мысленно убрать звено 5 (или 2), то при этом характер движения остальных звеньев останется неизменным. Механизм превращается в обычный четырёхзвенник, W которого мы уже определили – W=1. При устранении звена 5 одновременно устраняется 2 кинематические пары: 5-1, 5-3. Следовательно, в этом механизме избыточными является одно звено и две кинематические пары.
Определим W по формуле Чебышева:
По схеме механизма видно, что он будет работать и W=1.
Пусть отсутствует непосредственное соединение звеньев 2-3. Звенья 3, 4, 5 всё равно займут положение, соответствующее углу поворота j1 звена 1, т. к. звенья 1, 2, 4 должны быть зафиксированы этим углом. То же самое можно получить, если удалить кинематическую пару 2-4 или 4-3. Здесь одна кинематическая пара избыточная. Её можно не учитывать. Тогда:
При этом замечаем, что устранение звена влечёт за собой устранение некоторых кинематических пар. Устранение кинематических пар (прекращение контакта звеньев) не влечёт за собой как неизбежное устранение входящих в неё звеньев.
Соединение звеньев, где соединяется 3 и более звеньев, называется узлом. В узле на одну кинематическую пару меньше, чем звеньев.
Избыточные кинематические пары и звенья накладывают дополнительные условия на точность изготовления механизма, однако несмотря на это в механизм вводят иногда пассивное звено или лишнюю связь с целью получения каких либо дополнительных необходимых качеств; увеличение прочности, уменьшение трения и др.
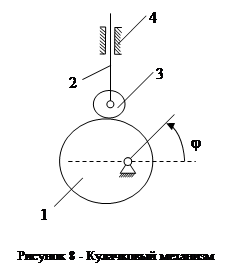
Определим W кулачкового механизма, изображенного на рисунке 2.8. Здесь звенья 1- кулачок, 2- толкатель, 3- ролик, 4- стойка. Количество звеньев n=4. Кинематические пары 1-4, 2-4, 2-3 пятого класса и 3-1 – высшая плоская кинематическая пара 4 го класса. При повороте кулачка на угол j толкатель займёт определённое положение. На первый взгляд W=1.
Определим W по формуле Чебышева:
Здесь есть лишняя степень подвижности. Если бы ролик неподвижно закрепить с толкателем, то W механизма была бы равна единице. Поворот ролика по отношению к остальным звеньям не оказывает никакого влияния. Угол поворота ролика- это и есть лишняя степень свободы механизма.
Лишней степенью свободы называется такая степень свободы в движении некоторых звеньев, устранение которой не вызывает изменений в характере движения других звеньев по кинематическим соображениям.
При этом имеется в виду абсолютное или относительное движение звена. Устранение лишней степени свободы не влечёт за собой устранение звена.
Прежде чем пользоваться формулой Чебышева необходимо мысленно исключать из рассмотрения пассивные связи и лишние степени свободы.
Формула Чебышева в общем случае даёт правильный ответ. В общих случаях пассивные связи и лишние степени свободы не существуют и могут быть только в частных случаях.
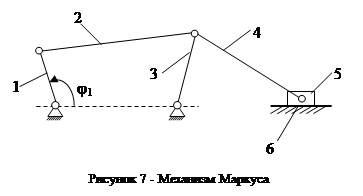
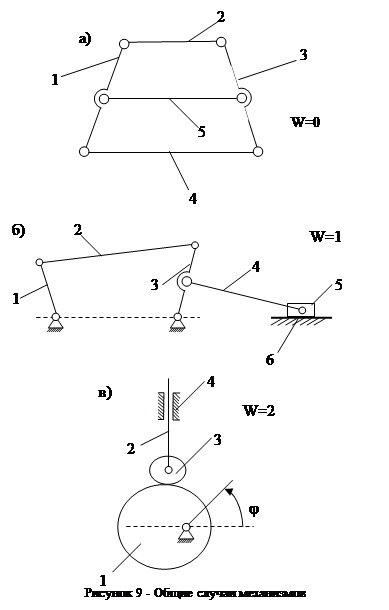
Например: механизм двойного параллелограмма является частным случаем такого же механизма, когда звенья не параллельны (рисунок 9а); механизм Маркуса является частным случаем механизма, когда оси шарнирных соединений звеньев 2, 4 не совпадают (рисунок 9б); круглый ролик является более частным случаем геометрической формы ролика не круглой формы (рисунок 9в).
Таким образом формула Чебышева даёт возможность выявить характерные особенности (частности) механизмов.
Степень подвижности кинематической цепи

Степень подвижности кинематической цепи
Число возможных независимых движений кинематической цепи относительно одного из звеньев называют степенью ее подвижности. Для определения степени подвижности кинематической цепи  необходимо из общего числа степеней подвижности всех ее подвижных звеньев вычесть число связей, накладываемых на относительное движение звеньев кинематическими парами, которыми соединены звенья. Пусть
необходимо из общего числа степеней подвижности всех ее подвижных звеньев вычесть число связей, накладываемых на относительное движение звеньев кинематическими парами, которыми соединены звенья. Пусть  — число подвижных звеньев пространственной кинематической цепи;
— число подвижных звеньев пространственной кинематической цепи;  — число кинематических пар
— число кинематических пар  -го класса
-го класса  . Тогда 6 — общее число степеней подвижности звеньев цепи, считая их не связанными между собой, a
. Тогда 6 — общее число степеней подвижности звеньев цепи, считая их не связанными между собой, a  — общее число связей, наложенных на звенья механизма кинематическими парами -го класса.
— общее число связей, наложенных на звенья механизма кинематическими парами -го класса.
С помощью введенных обозначений степень подвижности кинематической цепи можно определить по выражению
Развернув сумму в выражении (1.1), получим структурную формулу (математическую модель)пространственной кинематической цепи общего вида (формулу Сомова-Малышева):

Формула (1.2) показывает, какому количеству звеньев кинематической цепи должно быть задано движение (т. е. сколько должно быть ведущих звеньев), чтобы движение остальных звеньев было определенным, единственно возможным. Формулой можно пользоваться, если учесть дополнительные общие условия связи, которые накладывают ограничения на движение всех звеньев кинематической цепи. Например, для плоской кинематической цепи, у которой звенья движутся параллельно одной неподвижной плоскости, перпендикулярной осям вращательных пар, на них наложены три общие связи (см. рис. 1.1). Звенья такой цепи не могут перемещаться вдоль оси, перпендикулярной к неподвижной плоскости, и вращаться относительно двух осей, лежащих в этой плоскости. Число степеней подвижности каждого звена дополнительно уменьшается здесь на 3 — число общих связей. Общее число степеней подвижности звеньев цепи будет равно (6-3), т.е. каждая кинематическая пара в этом случае накладывает на движение звеньев цепи на три ограничения меньше класса пары. Так, пары 5-го и 4-го классов (только они могут быть использованы в этом случае) накладывают на движение звеньев плоской кинематической цепи соответственно две и одну связи, а кинематические пары 1-го, 2-го и 3-го классов в такой (плоской) кинематической цепи не могут быть использованы.
Для плоской кинематической цепи структурная формула (1.2) имеет вид (формула Чебышева)

Кинематические пары 5-го класса в плоском механизме могут существовать в виде вращательной и поступательной пар (см. табл. 1.1).
Поскольку механизм представляет собой кинематическую цепь, то степень его подвижности определяется по формулам (1.2), (1.3) с учетом общих связей, наложенных на все звенья механизма. Степень подвижности механизма соответствует количеству независимых (обобщенных координат), которое необходимо задать для однозначной определенности положений всех звеньев механизма. Так, для механизма шарнирного четырехзвенника имеем (см. рис. 1.1).

Степень подвижности подсчитываем по формуле (1.3):

Следовательно, данный механизм должен иметь одно ведущее звено и одну обобщенную координату. В качестве обобщенной координаты обычно выбирают угловую координату ведущего звена  .
.
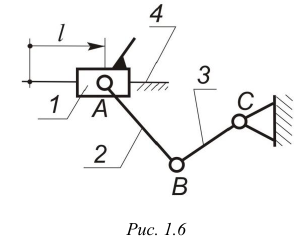
Для кривошипно-ползунного механизма (рис. 1.6) параметры формулы (1.3) такие же, как и для механизма шарнирного четырехзвенника. Ведущее звено (ползун 1) движется прямолинейно, и за обобщенною координату принимается линейная координата ползуна.
В механизмах с двумя степенями подвижности за обобщенные координаты выбираются координаты двух ведущих звеньев или одного ведущего звена, если это звено образует со стойкой кинематическою пару с двумя степенями свободы подвижности
Структурные формулы механизмов (1.2) и (1.3), полученные с применением понятия «класс кинематической пары» на наш взгляд проще и понятнее можно получить используя понятие «степеней подвижности кинематической пары» — число возможных независимых движений одного звена относительно другого, которые позволяет совершать данная кинематическая пара. С этих позиций все кинематические пары (табл. 1.1) можно поделить пары от пятиподвижной (шар на плоскости) до од-ноподвижной (только с вращательным или только с поступательным движением).
Если обозначить, как и выше,  — число подвижных звеньев кинематической цепи (механизма),
— число подвижных звеньев кинематической цепи (механизма),  — числа соответственно одно-, двух-, трех-, четырех- и пятиподвижных кинематических пар, то структурная формула пространственного механизма с учетом приведенных выше пояснений будет иметь вид,
— числа соответственно одно-, двух-, трех-, четырех- и пятиподвижных кинематических пар, то структурная формула пространственного механизма с учетом приведенных выше пояснений будет иметь вид,

Для плоского механизма

Формулы (1.2), (1.3), (1.2′), (1.3′) справедливы для механизмов без избыточных (пассивных) связей и лишних степеней подвижности. Однако часто для выполнения специальных требований в механизм включают дополнительные элементы и звенья, которые не оказывают влияния на движение остальных звеньев и называются пассивными. Избыточными (пассивными) связями в механизме называют повторяющиеся связи, которые дублируют ограничения, наложенные другими связями. Избыточные связи можно устранить из механизма, сохранив при этом задание точных условий связи. Для изучения движения механизмов их следует удалить и учитывать только те связи и степени подвижности, от которых зависит определенность их движения.
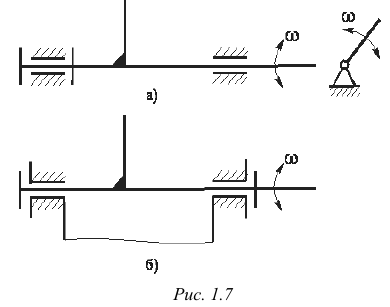
Так, например, простейший двухзвенный механизм, состоящий из стойки и вращающегося звена — ротора (электродвигатели, электрогенераторы, турбины различных типов и т.д.) имеют две опоры, а не одну, как это необходимо с точки зрения кинематики такого устройства (рис. 1.7 а). Степень подвижности такого механизма по зависимости (1.3′) обусловлена введением дополнительной (правой) опоры, создавшей избыточную (пассивную связь). В действительности при надлежащей точности изготовления опор левой и правой (расточка отверстий и окончательная обработка опорных мест вала за одну установку) действительная степень подвижности и теоретическая равны единице (рис. 1.7 б).
Избыточную (пассивную) подвижность, не влияющую на движение ведомого звена, можно обнаружить у механизма пространственного четырехзвенника, рис. 1.4, для которого степень подвижности по выражению (1.2′)
У этого механизма избыточная подвижность обусловлена возможностью вращения звена 2 относительно его продольной оси.
Избыточная подвижность имеется у кулачковых механизмов, у которых толкатель снабжен роликом, вращательное движение которого не влияет на движение этого толкателя.
Эта теория взята со страницы лекций по предмету «прикладная механика»:
Возможно эти страницы вам будут полезны:
Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института