Сколько поколений в истории создания и развития робототехники можно выделить




3. Три поколения роботов
Историю развития роботов в настоящее время принято делить на поколения. Надо сразу же сказать, что это деление весьма условно. Идея делить роботы на поколения вызвана к жизни тем, что за время короткой истории своего развития роботы претерпели большую эволюцию как в смысле элементной базы, на которой они строятся, так и особенно в смысле изменения их структуры, появления новых функций и возможностей, расширения областей их применения, характера использования.
Область возможных (и экономически целесообразных) применений роботов первого поколения достаточно широка. Эти роботы успешно применяются для обслуживания станков (в частности, станков с цифровым программным управлением), печей, прессов, технологических линий, сварочных аппаратов, литейных машин и т. п. Они осуществляют установку, транспортировку, упаковку изделий, простейшие сборочные операции, сварку, ковку, литье под давлением, термическую и механическую обработки и т. п. Особенно широко программные роботы применяются в машиностроении, металлургии и атомной промышленности.
Следует отметить, однако, что функциональные возможности роботов первого поколения существенно ограничиваются малым ассортиментом информационно-измерительных датчиков и несовершенством управляющей системы, служащей лишь для осуществления заранее заложенной в памяти жесткой программы. Способность к восприятию внешнего мира и к формированию его модели у роботов первого поколения практически отсутствует. Поэтому эти роботы принципиально не могут функционировать совершенно самостоятельно (автономно), без вмешательства человека. Упомянутые ограничения привели к тому, что в последнее время особую актуальность приобрели научно-исследовательские и опытно-конструкторские разработки по созданию следующего, более совершенного поколения роботов.
Роботы второго поколения, оснащенные большим ассортиментом сенсорных датчиков и управляющей ЦВМ, значительно превосходят по своим функциональным возможностям программных роботов. Благодаря способности воспринимать изменения во внешней среде, анализировать сенсорную информацию и приспосабливаться к существующим условиям функционирования, очувствленные роботы могут работать с неориентированными деталями произвольной формы, осуществлять сборочные и монтажные операции, собирать информацию о неизвестной и, возможно, меняющейся внешней среде и т. п.
Однако очувствленные роботы, вообще говоря, не должны заменить роботы первого поколения. Оба поколения роботов взаимно дополняют друг друга, выполняя действия различной сложности при различной степени информированности о внешней среде. Их совокупность позволяет автоматизировать подавляющее большинство ручных и транспортных операций в сфере промышленного и сельскохозяйственного производства.
В настоящее время роботы второго поколения еще не выпускаются серийно ни в СССР, ни за рубежом. Однако в ряде промышленно развитых стран ведутся интенсивные исследования по разработке алгоритмического, программного и технического обеспечения очувствленных роботов и отработке их экспериментальных образцов. Предполагается, что роботы второго поколения будут освоены промышленностью в ближайшие годы.
Характерной особенностью интеллектуальных роботов является их способность к обучению и адаптации в процессе решения задач. Что же касается самого умения решать интеллектуальные задачи, то оно является производным в том смысле, что целиком зависит от того, как протекал процесс обучения и адаптации робота.
В общем случае интеллектуальный робот способен понимать язык и вести диалог с человеком, формировать в себе модель внешней среды (с той или иной степенью детализации), распознавать и анализировать сложные ситуации, формировать понятия, планировать поведение, строить программные (желаемые) движения исполнительной системы и осуществлять их надежную отработку в условиях неполной информированности о характеристиках среды, робота и условий его функционирования. Следует отметить, однако, что в настоящее время реальные потребности в интеллектуальных роботах пока еще не созрели, хотя целесообразность их создания признается многими учеными. Если роботы второго поколения уже сейчас необходимы для ряда научно-технических разработок (в частности, для космических и глубоководных исследований), а в ближайшем пятилетии начнут применяться в промышленности, то роботы третьего поколения пока не вышли из лабораторий. По мнению президента крупнейшей роботостроительной фирмы «Юнимейшн» Д. Энгельбергера первые промышленные образцы интеллектуальных роботов могут появиться не раньше 1980 г.
Почему же ученые и инженеры, уже давно понимающие принципиальную возможность создания интеллектуальных роботов, до сих пор их не создали?
В чем же причины трудностей?
Мы уже говорили, что очень легко составить жесткую программу движения для роботов первого поколения. Реализация такой программы обеспечивает выполнение одной и той же последовательности операций, если среда, в которой функционирует робот, строго организована и неизменна.
Иначе обстоит дело в случае, когда при разных обстоятельствах от робота требуется разный порядок операций. Однако сложность возрастает ненамного, если заранее четко сформулировать, чем должен определяться выбор следующего действия в тех или иных ситуациях. Например, чтобы произвести заданную последовательность технологических операций с объектами, окрашенными в разные цвета, нужно перед каждой операцией выбирать объект нужного цвета. Для решения подобного рода задач служат очувствленные роботы.
Именно метапрограммы придают роботу способности решать множество задач, требующих привлечения интеллекта, и адаптироваться (приспосабливаться) к разнообразным и даже неизвестным условиям функционирования. Интересно отметить, что поведение подобного интеллектуального робота, управляемого метапрограммами, будет выглядеть вовсе «не машинным». Его действия будут настолько сложно зависеть от огромного множества обстоятельств (в том числе и далеко отстоящих во времени), что внешне будет полная иллюзия «свободы воли» в целенаправленной деятельности робота.
Эволюция роботов вовсе не означает, что одно поколение роботов последовательно приходит на смену другому. На самом деле это не так, хотя определенная преемственность имеется. Как мы видели, эволюционный процесс совершенствует функциональные возможности и технические характеристики роботов от поколения к поколению. Однако при этом каждое поколение роботов представляет собой семейство роботов различных типов, предназначенных для решения разнообразных прикладных задач.
Роботека
О сайте
Вы здесь
История роботов. Хронология развития роботов

Предыстория изобретения роботов (XV-XIX века)
1500 год. Франция поражена механизированным львом Леонардо да Винчи. Когда король посещал Милан, этот механизм двигался и представлял герб государства.
1617 год. Джон Непер разрабатывает элементарное вычислительное устройство.
1623 год. Вдохновлённый разработками Непера, Вильгельм Шиккард из Германии создаёт счётную машину, работающую с шестиразрядными десятичными числами.
1642 год. Паскаль излагает видение механизированной машины, способной слагать и вычитать числа самостоятельно.
1878 год. На Всемирной выставке в Париже Пафнутий Чебышев презентует стопоходную машину, движения которой подобны шагам лошади. Этот механизм даёт новый толчок развития технологий роботостроения.
1891 год. Мечта о беспроводной электрификации города привела Николу Тесла к изобретению катушки, производящей напряжение высокой частоты. Принцип действия объяснял природу возникновения электричества и возможности его использования.
1893 год. Тесла создаёт асинхронный двигатель, питающийся от сети переменного тока. Опираясь на различая в скорости движения и направления вращения магнитных полей статора и ротора, достигается вращение ротора.
1894 год. Никола Тесла патентует электродинамическую индукционную лампу, обладающую рядом конкурентных преимуществ, по сравнению с аналогами того времени.
1898 год. Научная мысль Теслы привела его к открытию первого в мире пульта дистанционного управления. Он был установлен на лодке, винт и руль которой контролировались при помощи радиоволн.
История развития роботов (XX век)
1913 год. Создание Чарльзом Маколи машины, находящей решения логических проблем.
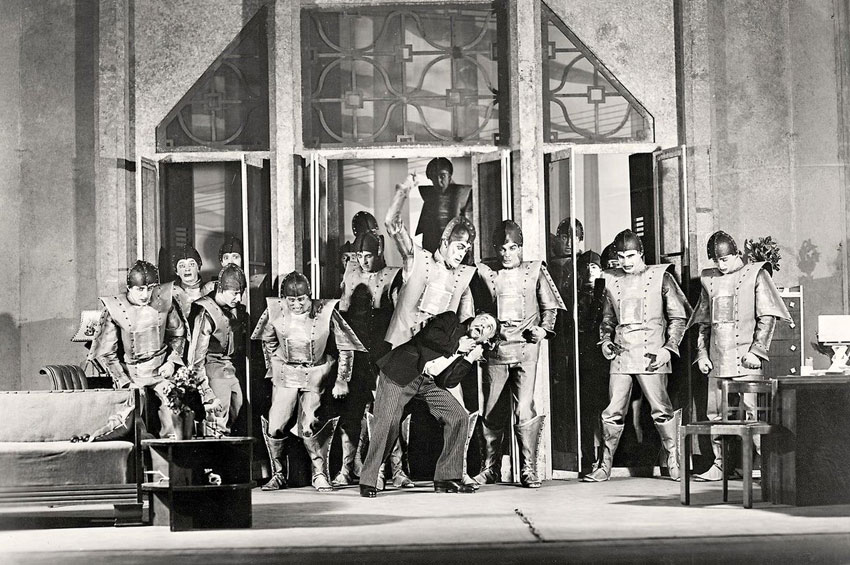
1921 год. Первое упоминание слова «робот» (robota с чешского) в пьесе «R.U.R.» Пьеса была написана Карелом Чапеком в 1920 году («R.U.R» с чеш.яз. Rossumovi univerzalna roboti, «Россумские универсальные роботы»).
25 января 1921 года состоялся премьерный показ пьесы.
1934 год. Создание индустриального конвейерного робота для покраски поверхностей.
1946 год. Презентация механизма управления машинами посредствам магнитного записывающего устройства.
1950-е года. Активная разработка механических манипуляторов, которые копировали движение человеческих рук для внедрения на радиоактивные производства.
1963 год. На выставке в Калифорнии представлена искусственная рука Rancho Arm, сопоставимая с человеческой.
1971 год. Изобретение первого в мире микропроцессора.
1980 год. Сильнейший скачок роста рынка робототехники, произошедший благодаря коммерческой реализации японских роботов, производимых на базе высоких технологий.
1992 год. К Марку Торпу, в ходе разработки робота-пылесоса, приходит мысль организовать бои роботов.

Роботы XXI века
2000 год. Компания Electrolux в эфире телеканала BBC представила робот-пылесос Trilobite, который самостоятельно передвигался по помещению и собирал пыль.
2001 год. Изобретение гибкого дисплея FOLED, в котором был использован гибкий пластик (или металлическая пластина) в качестве подложки.
2002 год Ознаменовался началом эры планшетов, у истоков которой стоял Microsoft Tablet PC – первый планшетный компьютер.
2003 год. В свет выходит QRIO. Детский робот, в котором заложена основа адаптивного поведения, может держать равновесие, стоя на одной ноге, использует в речи более 60 000 слов и танцует.
2003 год. Через 4 года после изобретения робота-пылесоса Trilobite, компания Electrolux выпускает второе поколение этой модели. Усовершенствования коснулись не только дизайна, но и функционала: он «научился» объезжать препятствия, «знал» когда нужно возвращаться к зарядному устройству, при этом уровень шума был значительно снижен.
2004 год. Марк Тилден создает первую коммерчески успешную игрушку робота Robosapien.
2005 год. Военная робототехника прославилась изобретением PackBot с системой REDOWL. Противоснайперская программа различала звук выстрела среди всех остальных и точно определяла координаты стрелявшего. Затем, производилось наведение лазерного прицела на цель.
2006 год. Лаборатория NEC System Technologies представила робота-дегустатора. Помимо возможности распознать продукт, он давал советы по сочетанию закусок и напитков менее чем за полминуты.
2007 год. Испытания тестового робота-милиционера Р-БОТ 001, проводимые МВД России в городе Пермь.
2008 год. В Европейском совете ядерных исследований разработали проект Большого адронного коллайдера, предназначенного для изучения продуктов соударений на высокой скорости протонов и тяжёлых ионов.
2009 год. Создание первого биологического 3D-принтера, способного на микроуровне воссоздавать архитектуру ткани организма.
Роботы нового времени
2010 год. Корейская фирма Ilshim Global презентует первого в мире робота для мойки окон Windoro, который самостоятельно определяет размер поверхности и выстраивает маршрут
2011 год. Доставлен на МКС робот НАСА Робонавт-2
2011 год. Компания Inventist под началом Шейна Чена патентует первое моноколесо Solowheel, отличающееся от более ранних аналогов отсутствием сиденья и наличием системы гироскопов. Новшества позволили наладить массовое производство устройства.
2013 год. На Международную Космическую Станцию прибывает робот-астронавт японского производства.
2013 год. Запатентовано первое двухколёсное самобалансировочное средство передвижения – гироскутер.
2014 год. Беспроводная электроэнергия. Первые удачные испытания катушки, генерирующей электрическое поле. Это изобретение позволяет в радиусе 2,5 метров заряжать электронные устройства, освобождая их от розетки и проводов.
2015 год. Настоящим переворотом в электрическом автомобилестроении стала презентация внедорожника Tesla Model X, который способен без подзарядки преодолеть 402 км. А разгон до 100 км/ч осуществляется за 3 секунды.
2016 год. Исследования в области медицины, направленные на помощь людям, страдающим когнитивными расстройствами, привели к появлению коллекции посуды Eatwell Assistive Tableware. Она разработана с учётом всех особенностей приёма пищи людей с болезнью Альцгеймера.
С 2017 года. Основное направление робототехники – это прогресс искусственного интеллекта. Главная цель разработок – приучение ИИ к саморазвитию, мгновенному приспосабливанию к изменяющимся факторам внешней среды и поиск оптимального решения поставленных задач.
В течении ближайшего времени разрабатываются сразу нескольких роботизированных проектов:
AEROWORKS – роботы-квадрокоптеры, контролирующие работу производственных объектов;
FLOBOT – улучшенная модель уборщиков, предназначенная для эксплуатации в огромных промышленных помещениях;
Робот-сиделка для больных в период реабилитации после сложных операций;
EurEyeCase – высокоточные хирурги, специализирующиеся на операциях сетчатки глаза;
Роботы-фермеры, выполняющие полный спектр сельскохозяйственных операций, начиная с подготовки грунта, заканчивая сбором урожая.
Первые роботы и краткая история развития робототехники
Сайт работает и функционирует при поддержке казино фреш
Сайт работает и функционирует при поддержке казино фреш
Сайт работает и функционирует при поддержке казино фреш

В массовом сознании слово «робот» ассоциируется в основном с научными достижениями и идеями 20-21 веков. Особенно часто этот термин мало разбирающийся в технических областях человек встречает в произведениях научной фантастики – романах Айзека Азимова, сериях фильмов «Терминатор», «Трансформеры» и т.д. Более продвинутые из них еще могут припомнить советские «Луноходы», промышленные или медицинские аппараты, зверо- или человекоподобных роботов из рекламных роликов компании Boston Dynamics. Однако, как и многие другие великие идеи человечества, концепция автоматизированных механизмов, способных самостоятельно выполнять различные операции, появилась гораздо раньше и прошла длительный путь своего развития.
Определение понятия
Робота следует отличать от простых механизмов и автоматов. Это устройство обладает способностью к более тесному и комплексному взаимодействию с оператором и внешней средой. Если простой автоматический механизм при выполнении определенного действия слепо следует заранее заложенному в нем алгоритму, то робот способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия. Таким образом его взаимодействие с внешней средой становится более гибким, точным и универсальным. Даже самые первые в мире роботы, о которых будет сказано далее, имели примитивные аналоги органов чувств, без которых это принципиальное отличие было бы невозможным.
У истоков: первые прообразы роботов
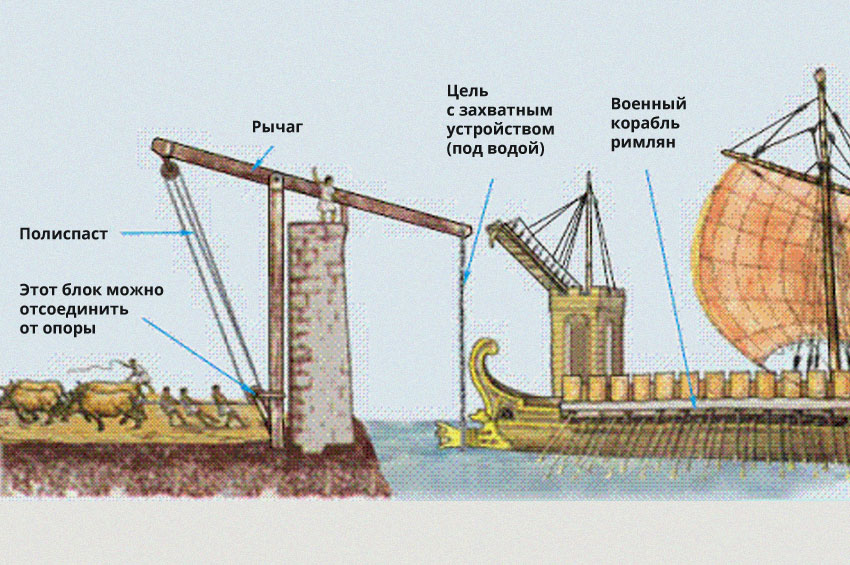
Другой гениальный грек, Герон Александрийский, изобрел первый в истории программируемый автомат. Тележка, вывозившая на сцену механизированные марионетки, управлялась с помощью веревки и колышков. Изменяя положение последних, Герон регулировал наматывание тросиков на независимые оси повозки, тем самым задавая ей траекторию движения. Этот принцип в чем-то похож на перфорированные ленты и карты – средства записи и хранения информации, используемые в автоматических станках и ЭВМ вплоть до 80-х годов ХХ века.
История робототехники была бы неполной без достижений других государств того времени. Так, еще в конце 2 тысячелетия до н. э., задолго до древнегреческих механизмов, в Древнем Египте жрецы изготовили статую, которая поднятием руки указывала на наследника фараона во время религиозных церемоний. А в Китае примерно в это же время местные мастера создавали первые прототипы роботов, приводимые в действие силой пороховых взрывов. Великий мудрец Лао-Цзы упоминал о механическом человеке, разработанном для императора на рубеже 1 и 2 тысячелетия до н. э.
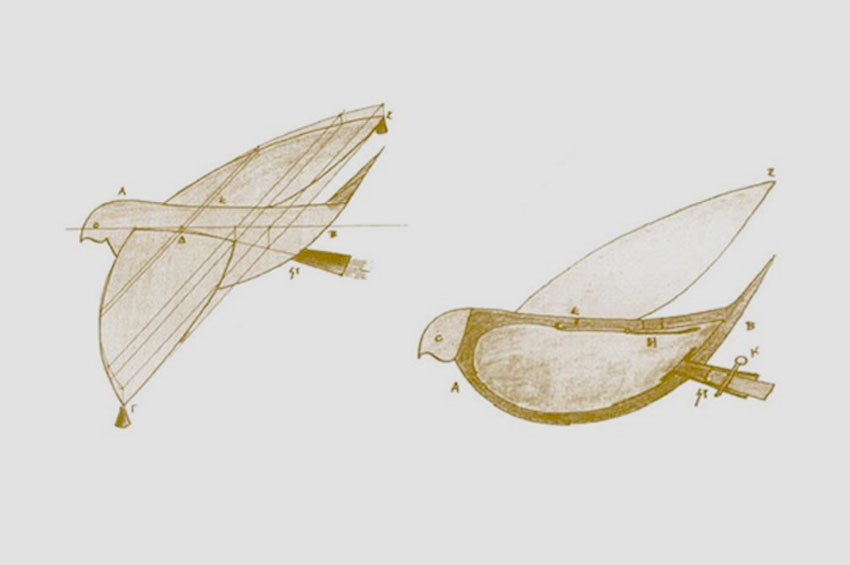
И все же именно Древнюю Грецию можно считать родиной робототехники, потому как здесь были не просто построены многие автоматические устройства, но теоретизированы принципы их создания и функционирования.
Античные изобретатели и ученые разработали многие виды передач и двигателей (в том числе паровой, гидравлический и пневматический), сформулировали основные законы классической механики, благодаря чему последующие поколения смогли воспроизвести и развить их опыт.
«Роботы» Средневековья
Вопреки распространенному мнению, Средние века не были эпохой всеобщего упадка и технологического регресса. Наука, в том числе механика, хотя и с некоторой задержкой в первые века после падения античных держав, продолжала свое развитие. Удивительно, но многие сложные устройства появились на свет благодаря силе, которая в массовом сознании ассоциируется только с мракобесием – а именно Церкви. В те времена католические монастыри были одним из центров научной и инженерной мысли. В частности, легенды приписывают виднейшему ученому и теологу Альберту Великому создание «механической служанки», которая умела самостоятельно передвигаться и даже воспроизводить речь. Задокументированным, и, следовательно, более достоверным, выглядит свидетельство средневекового архитектора Виллара де Онекура (13 век н. э.), который в своем труде описал зооморфные механизмы, а также фигуру ангела, поворачивающуюся вслед за движением солнца. К тому же 13 веку относится увеселительный сад в поместье графа Роберта II д’Артуа, заполненный автоматическими обезьянами, птицами и механизированными фонтанами.
Большое развитие механика получила в это время и на Востоке. Византия, практически не затронутая потрясениями Раннего Средневековья, славилась автоматонами, встречавшими иностранных гостей в императорском дворце. Согласно свидетельствам, около царского трона были расположены два металлических льва, которые умели реветь и бить хвостами, а в кронах деревьев находились механизированные птицы, певшие и щебетавшие на разные голоса. В мусульманских странах того времени механика и математика вышли на качественно новый уровень, благодаря чему их мастера создавали удивительные устройства. Так, братья Бану Муса в 9 веке н. э. изобрели искусственного флейтиста, а видный ученый того времени Али ибн Халаф аль-Маради, живший в 11 веке, в своей «Книге тайн» описал около 30 сложных автоматонов.

Здесь же следует упомянуть и легенду о «железном мужике», созданном придворными мастерами Ивана Грозного. Согласно ей, человекоподобный механический слуга при дворе русского царя подавал ему чашу с вином и кафтан, подметал пол, кланялся гостям и даже «побивал медведя». Звучит фантастично, но следует учитывать, что эта легенда основана на письмах голландского купца Йохана Вема – человека крайне прагматичного и не склонного к фантазиям.
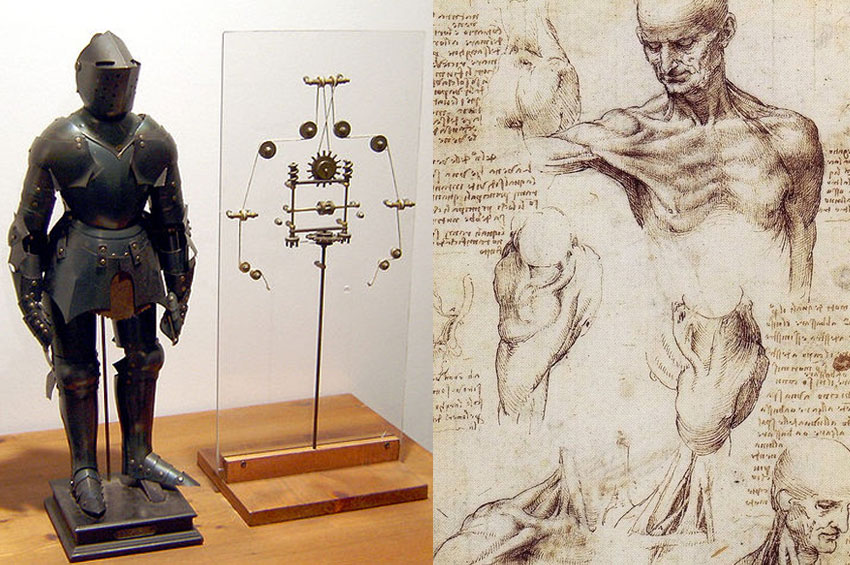
На закате эпохи Средневековья автоматические устройства, воспроизводящие достаточно сложные действия, популяризировались и легендарным Леонардо да Винчи.
Леонардо да Винчи, будучи гением инженерной мысли, в своих зарисовках предложил схемы самых разных механизмов, одним из которых является фигура закованного в латы рыцаря, которая могла двигать руками и шеей, садиться и даже открывать рот. Собранный образец демонстрировался изобретателем при дворе Людовика Сфорца, герцога Миланского, в 1495 году. В 20 веке по сохранившимся чертежам была воспроизведена точная и функциональная копия этого устройства, сегодня хранящаяся в Миланском музее.
Новое время: золотой век автоматонов
Однако настоящую популярность и бурное развитие автоматические механизмы получили с началом эпохи Возрождения. Наука, вырвавшись из монополии Церкви, получила дополнительный импульс к развитию, в том числе за счет переосмысления достижения античных ученых. И на первую роль в новой волне старинной робототехники вышли часовщики. Здесь стоит упомянуть о двух важных изобретениях, которые способствовали развитию технологии автоматонов – пружинному и маятниковому заводным механизмам. До этого подобные устройства приводились в движение гирями, что позволяло создавать только крупные и относительно несложные изделия. Новые накопители энергии (пружина и маятник) стали настоящим прорывом в миниатюризации автоматических механизмов.
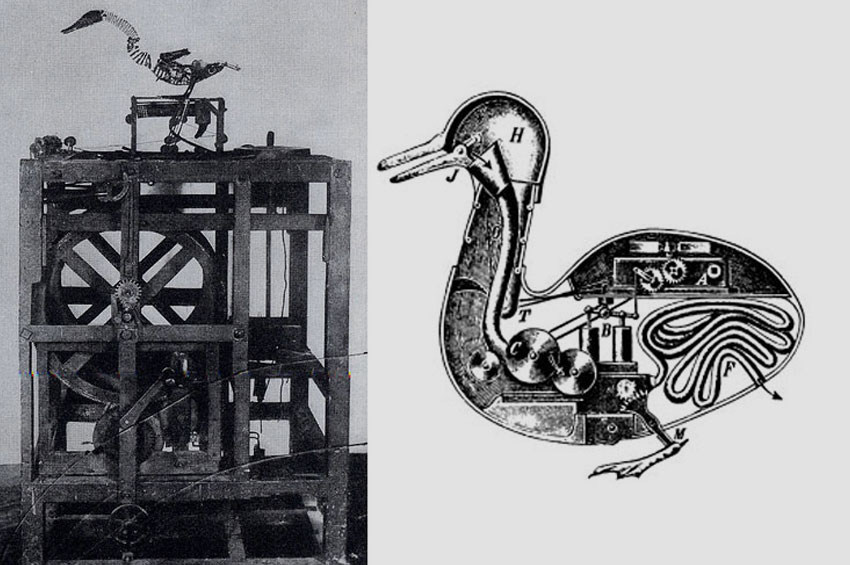
Особенно прославился на этом поприще мастер Жак де Вокансон, который жил в 18 веке – к слову, в детстве обучавшийся в иезуитской школе. Особенную популярность получили два его изобретения:
Другим известным мастером был швейцарец Пьер Жаке Дро, живший в том же 18 веке и основавший знаменитую часовую компанию Jaquet Droz. В то время он прославился не только своими хронометрами, но и множеством сложнейших устройств, среди которых особенно известно три его творения:

Отличительной чертой этих автоматонов была возможность их программировать, для чего использовались барабаны или диски с насечками, в которых была закодирована последовательность действий. Поменяв их расположение, мастер мог заставить свои устройства написать различные тексты, сыграть другую мелодию и т. д. И все же утверждать, что именно он создал первого робота, нельзя – его механизмы еще слишком мало взаимодействовали с внешней средой, а их функции были сугубо развлекательными.
Изготовление автоматонов развивалось по пути не только усложнения, но и миниатюризации устройств. Если первые образцы таких механизмов занимали достаточно много места, то к 19 веку их часто умещали в карманные часы. В основном это были сугубо развлекательные устройства, изготавливаемые для аристократов, передвижных цирков, выставок и т. д. Однако пройдет совсем немного времени, и автоматы начнут помогать людям.
Современный этап развития робототехники
Параллельно совершенствовались и способы управления – в частности проводной и радиоволновой. В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио. Одновременно вместо сложных механических приводов устройства начали обзаводиться более простыми, мощными и миниатюрными электрическими двигателями.
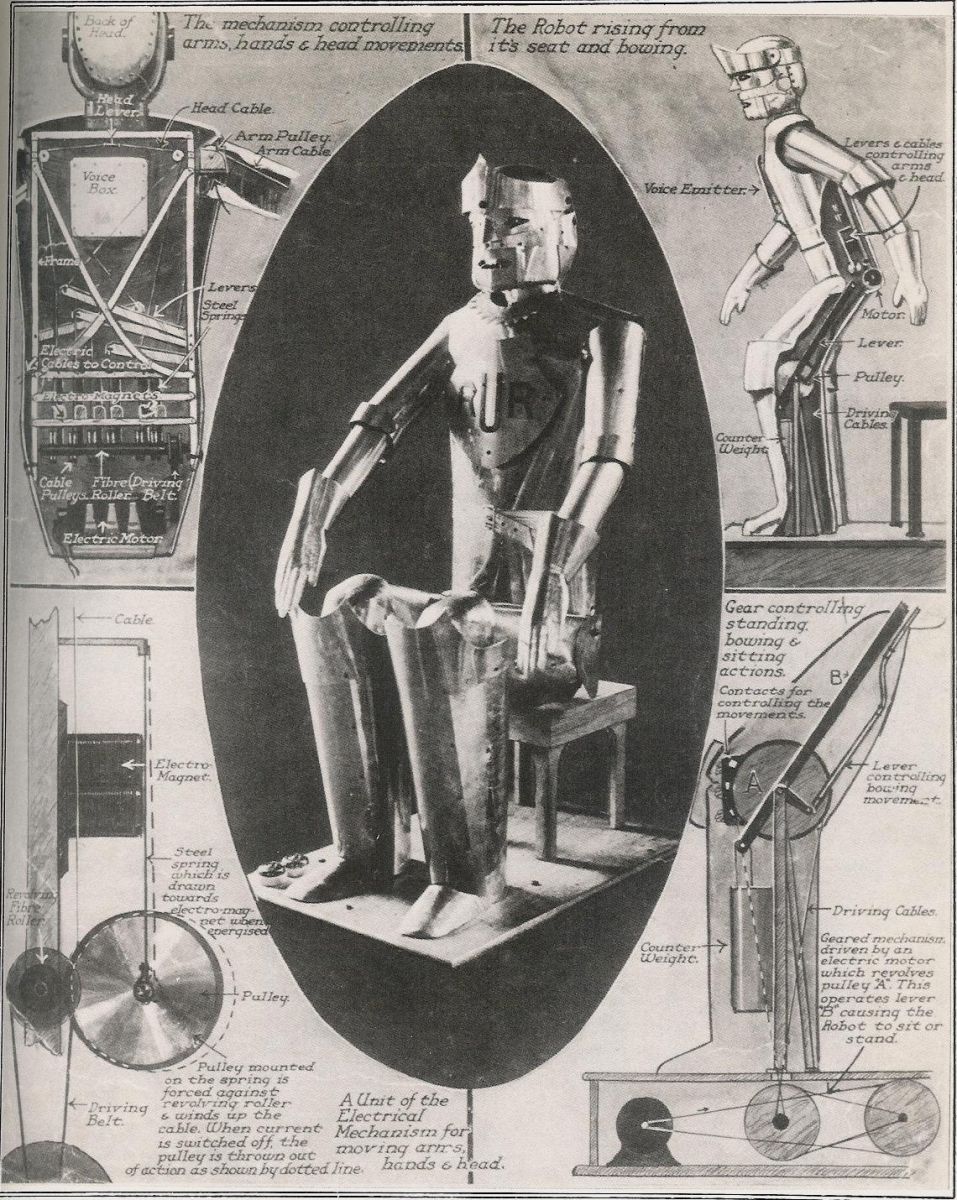
Уже к началу 20 века сформировались все условия, обусловившие создание первых роботов. Электрический ток стал не только источником питания, но и средством получения, передачи и обработки информации. Сложно сказать, когда появился первый робот в современном понимании этого слова. Многие компании и отдельные разработчики тех времен вели работу в области создания подобных машин. В 20-30-е годы прошлого века было разработано более 30 механизмов, соответствующих требованиям полноценной робототехники.
И все же считается, что человек, создавший первого действующего робота – американский инженер Рой Уэнсли из корпорации Westinghouse Electric Company. Разработанный им в 1928 году механизм под названием «Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д. Важнейшим отличием этого изобретения от автоматонов являлось умение отвечать и реагировать на команды, подаваемые ему по телефону. При этом робот был не подключен к линии напрямую – он, подобно человеку, с помощью встроенного микрофона слушал приказания. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а определенную последовательность гудков, писков, скрежетов и других звуков различной тональности.
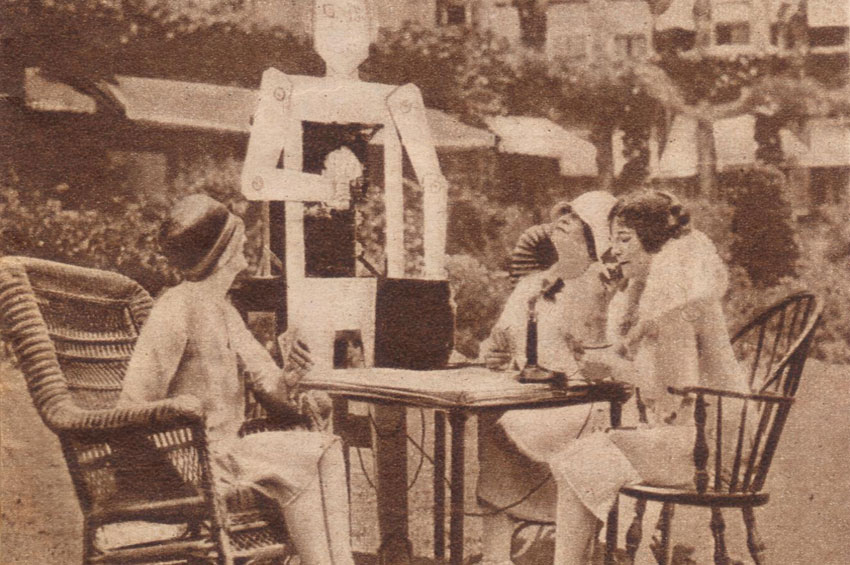
Первенство Роя Уэсли оспаривает Макото Нисимура – японский ученый-биолог, создатель первого действующего робота в Японии (1929 год). Этот управляемый по проводам антропоморфный механизм был способен по командам выполнять различные манипуляции руками, в частности писать. Еще одним претендентом на роль родоначальника роботов был Эрик, разработанный в том же 1928 году британским военным Уильямом Ричардсом. Механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
Однако эти и многие другие роботы предназначались для демонстрации научных достижений, но не для практической деятельности. Возникновение робототехники в производстве или сельском хозяйстве произошло позже, потому как такая работа требовала качественно нового уровня технологий. Хотя стоит отметить, что первый прообраз промышленного робота появился еще в 1898 году – это был созданный американским инженером Бэббитом манипулятор, с помощью которого выхватывались заготовки из раскаленной печи.
Полноценное развитие робототехники в промышленности произошло лишь после окончания Второй мировой войны.
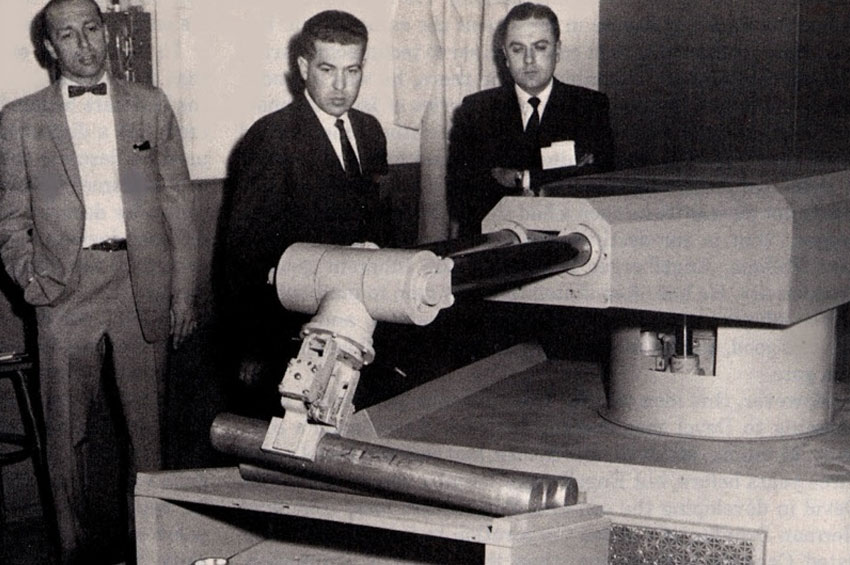
В 1948 году в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе. Его особенностью было наличие обратной связи – оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно. В середине 50-х годов американец Джордж Девол основал компанию Unimation, которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт. Уже к середине 60-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Особенно в этом преуспела Япония – закупив у «Юнимейшн» первые роботы в 1968 году, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
Сегодня роботы проникли практически во все сферы деятельности. Промышленность, научные исследования, энергетика, медицина, развлечения, военные действия и даже космос – современные автоматические или дистанционно контролируемые механизмы используются очень широко и даже постепенно вытесняют человеческий труд. Развитие роботов идет по нескольким направлениям – улучшение механизмов и приводов, совершенствование алгоритмов, внедрение самообучающихся систем управления (слабого искусственного интеллекта), а также разработка новых интерфейсов «человек-компьютер». Роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов (в том числе военных). Так наше общество незаметно для себя вошло в будущее, которое всего лишь век назад описал в своей пьесе Карл Чапек.