iSopromat.ru

Рассмотрим порядок построения планов скоростей и ускорений точек звеньев на примере кинематического исследования плоского рычажного механизма (рисунок 1).
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное – движение данной точки относительно той, движение которой принято за переносное:

На плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана.
На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает. Отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек.
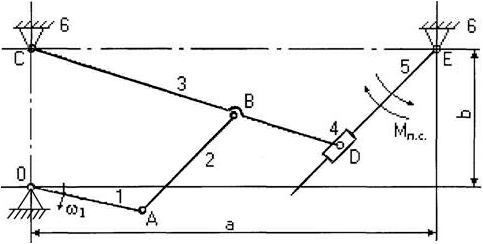
Рисунок 1 – Кинематическая схема плоского рычажного механизма
Рассмотрим построение планов для механизма, представленного на рисунке 1. Вначале рассматривается начальный механизм, а далее решение ведется по группам Ассура в порядке их присоединения.

По вычисленному значению VA выбираем масштаб плана скоростей KV и из произвольного полюса откладываем отрезок va изображающий эту скорость:
Можно также назначать отрезок va а масштаб KV вычислять:
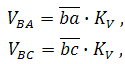
Истинные значения (в м/с) относительных скоростей VBA и VBC определяются после построения плана умножением соответствующих отрезков (в мм) на масштаб плана:
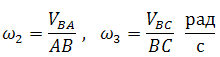
а зная их, можно определить и угловые скорости звеньев 2 и 3:

Группа Ассура второго класса 3-го вида (звенья 4,5) :
Примечание: в данном случае размер DE является величиной переменной (т.е. в задании он отсутствует), поэтому в каждом положении механизма он определяется через отрезок на чертеже и масштаб длин.
План ускорений строится в таком же порядке.
Начальный механизм
Ускорение точки A состоит только из нормальной составляющей, т.к. задана постоянная угловая скорость первого звена ( ω1=соnst ):

По вычисленному значению ускорения точки A выбирается масштаб плана ускорений и определяется отрезок на плане, соответствующий этому ускорению (или вычисляется масштаб плана ускорений по выбранному отрезку, изображающему ускорение точки A):
Здесь точка w – полюс плана ускорений.
Группа Ассура (звенья 2,3) второго класса 1-го вида:


Ускорение точки D определяем по подобию так же, как определяли скорость этой точки:

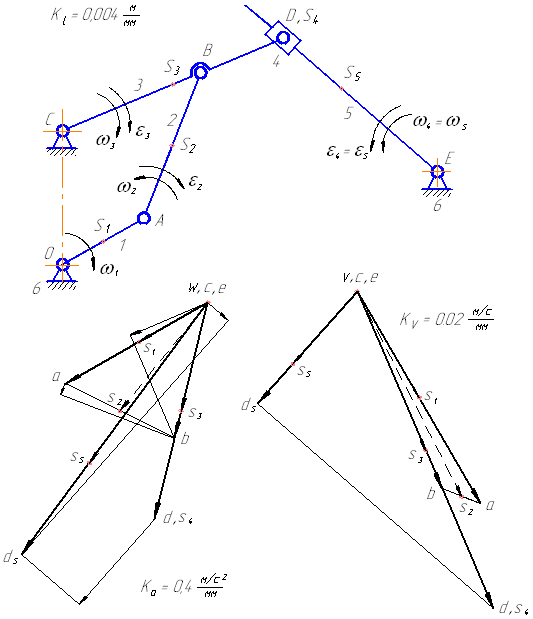
Рисунок 5 – Планы скоростей и ускорений для заданного положения механизма
Группа Ассура (звенья 4,5) второго класса 3-го вида:

При силовом расчете необходимо иметь ускорения центров масс ( asi ), которые на плане ускорений определяются методом подобия.
Планы скоростей и ускорений для первого положения заданного механизма приведены на рисунке 5.
Уравнение планов скоростей и ускорений для каждой группы Ассура приведены в таблице 1.
Таблица 1 – Кинематический анализ групп Ассура II класса методом планов
Кинематическая схема механизма предназначена для определения положений, траекторий, скоростей и ускорений точек и звеньев механизма. Для построения кинематических схем используются условные обозначения согласно ГОСТ 2770 – 68.
Планы положений механизма строятся методом засечек в масштабе (рис.2). В отличие от масштабов, применяемых в машиностроении, в теории механизмов и машин масштабы представляют собой именованные числа. Масштабы обозначаются буквой К с соответствующим индексом:
Масштабы длин и пути  , м /мм;
, м /мм;
Масштаб скоростей  , м/с.мм;
, м/с.мм;
Численное значение масштаба должно быть либо десятичной дробью, либо целым числом и включать в себя стандартные цифры или комбинации цифр: 1, 2, 4, 5, 15, 25, 75, 10, 20…….
Для выполнения кинематического анализа данного механизма в задаче № 1 требуется вычертить в выбранном масштабе Кs положение механизма изображенное в задании и для него построить план скоростей и ускорений 
1.2.2. Построение планов скоростей и ускорений
Метод построения планов скоростей и ускорений основан на теореме о разложении движения, согласно которой любое движение можно представить как сумму двух простых движений – переносного /поступательного/ и относительного /вращательного/. Тогда для скоростей:

 ,
,
где  — нормальная составляющая ускорения в относительном движении /определяется по данным плана скоростей/, на плане ускорений всегда направлена вдоль звена к центру относительного движения;
— нормальная составляющая ускорения в относительном движении /определяется по данным плана скоростей/, на плане ускорений всегда направлена вдоль звена к центру относительного движения;
 — касательная составляющая /определяется графически/ на плане ускорений, всегда направлена перпендикулярно к звену /радиусу/ относительного движения.
— касательная составляющая /определяется графически/ на плане ускорений, всегда направлена перпендикулярно к звену /радиусу/ относительного движения.
Для определения скорости или ускорения точки графическим путем не-обходимо составить систему из двух векторных уравнений. При составлении векторных уравнений движение точки рассматривается относительно двух других точек, с которыми эта точка связана и скорости которых уже известны.
Построить план скоростей и план ускорений для заданного положения механизма, изображенного на рисунке 2.
Пусть заданы размеры звеньев механизма: ОА = 150мм; АВ = 450мм и т.д. и частота вращения входного звена / кривошипа/ОА/, соответствующая n = 200 об/мин.
План скоростей рис.3.
Скорость пальца кривошипа /точка А/ определяется по формуле:
 ,
,
ОА – длина кривошипа, м;
Подставляя данные в формулу, получим:
Задаваясь длиной отрезка  /мм/, изображающего на плане скоростей вектор скорости точки А, получим масштаб плана
/мм/, изображающего на плане скоростей вектор скорости точки А, получим масштаб плана  :
:

Отрезок  :
:
= 62,8 мм
выбран так, чтобы был получен стандартный масштаб скоростей.
Рекомендуется выбирать отрезок не менее 50мм.
Из полюса плата скоростей р отложим вектор скорости точки А  перпендикулярно звену ОА/ по касательной к траектории движения точки А/ в сторону ее движения.
перпендикулярно звену ОА/ по касательной к траектории движения точки А/ в сторону ее движения.
Рис.2. План механизма
.
Рис.3. План скоростей
 Рис.4. План ускорений
Рис.4. План ускорений
Рассматривая движение точки В относительно точки А, а затем относительно ОI, имеем:
Из конца вектора скорости  /точка а/ проводим линию действия вектора относительной скорости
/точка а/ проводим линию действия вектора относительной скорости  перпендикулярно звену АВ, а затем из полюса p /т.к. V0 = 0/ перпендикулярно звену ВОI проводим линию действия вектора относительной скорости
перпендикулярно звену АВ, а затем из полюса p /т.к. V0 = 0/ перпендикулярно звену ВОI проводим линию действия вектора относительной скорости  до пересечения с линией действия вектора
до пересечения с линией действия вектора  в точке в. Отрезок
в точке в. Отрезок изображает вектор абсолютной скорости точки В
изображает вектор абсолютной скорости точки В  .
.
Скорость точки С /третьей точки звена ВАС/ найдем методом подобия. Можно записать следующее соотношение:
 или
или  ,
,
где  и
и  — отрезки на плане скоростей;
— отрезки на плане скоростей;
АС и АВ – размеры звеньев механизма.
Вычислив отрезок и отложив его на плане скоростей, получим точку  . Соединяя точку с полюсом
. Соединяя точку с полюсом  , найдем отрезок
, найдем отрезок  , изображающий вектор абсолютной скорости точки С (Vc).
, изображающий вектор абсолютной скорости точки С (Vc).
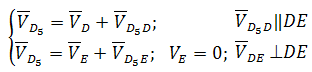
Для определения скорости точки Д рассмотрим движение этой точки относительно точек С и Ду / точка Ду принадлежит неподвижным направляющим и в данный момент совпадает с точкой Д /.
Система векторных уравнений имеет вид:
Так как VДУ =0, то  .
.
Абсолютные скорости каждой точки равны:
VВ =  , м/с
, м/с
VС =  , м/с
, м/с
VД =  , м/с
, м/с
VВА = 
 =
= 
VДС = 
План ускорений рис.4.
Рассматривая движение точки А относительно точки О, можно записать:

Ускорение ао = 0,  т.к.
т.к.  сonst. Следовательно, точка А при постоянной угловой скорости кривошипа будет иметь только нормальное / центральное/ ускорение:
сonst. Следовательно, точка А при постоянной угловой скорости кривошипа будет иметь только нормальное / центральное/ ускорение:

Величина нормального ускорения: 
Подставляя числовые значения, получим:

Задаваясь длиной отрезка  изображаемого на плане ускорений вектор ускорения точки А, получим масштаб плана ускорений
изображаемого на плане ускорений вектор ускорения точки А, получим масштаб плана ускорений 
Отрезок  выбран равным 65,8 мм, чтобы получить стандартный масштаб ускорений.
выбран равным 65,8 мм, чтобы получить стандартный масштаб ускорений.
Из полюса плана ускорений  откладываем вектор ускорения точки А
откладываем вектор ускорения точки А 
/отрезок / параллельно звену АО, направляя его от точки А к центру ее вращения – точке О.
Рассматривая движение точки В относительно точки А, а затем относительно точки О1, имеем:
Так как  то
то  .
.
Нормальное ускорение В в ее относительном движении относительно точки А по величине определяется следующим образом:
Удобнее сразу находить величину отрезка, изображаемого вектор нормального ускорения:
где — отрезок, изображений вектор относительной скорости  на плане скоростей, мм;
на плане скоростей, мм;
АВ – длина шатуна, м.
Направлен вектор  по шатуну от точки В к точке А.
по шатуну от точки В к точке А.
Вектор касательного ускорения  известен только по направлению – линия его действия перпендикулярна звену ВА.
известен только по направлению – линия его действия перпендикулярна звену ВА.
Чтобы распечатать файл, скачайте его (в формате Word).
iSopromat.ru
Метод планов скоростей и ускорений относится к графо-аналитическим методам исследования кинематики механизмов в теории механизмов и машин.
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное — движение данной точки относительно той, движение которой принято за переносное:
Этот принцип в равной степени относится к перемещениям, скоростям и ускорениям:

Планы скоростей и ускорений обладают следующими свойствами:
При кинематическом исследовании плоских механизмов методом планов скоростей и ускорений встречается два случая:
1) две точки (одна исследуемая, вторая с известным законом движения, которое принимается в качестве переносного) принадлежат одному и тому же жесткому звену (рисунок 13).
В данном случае относительное движение этих точек получается за счет вращательного движения звена, на котором они находятся. При определении ускорений относительное ускорение раскладывается на нормальное (известное из физики как центростремительное – стремящееся к центру вращения) и тангенциальное.
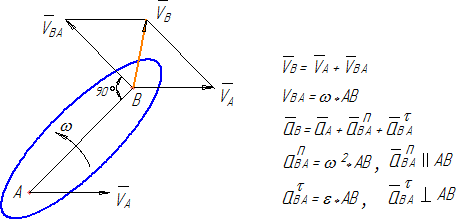
Для примера, приведенного на рисунке 13, нормальное ускорение точки В относительно точки А будет направлено вдоль радиуса ВА к точке А. Тангенциальное – перпендикулярно этому радиусу;
2) звенья соединяются поступательной парой. В этом случае рассматриваются две точки, совпадающие в данный момент времени по своему положению, но принадлежащие разным звеньям – одна ползуну, другая направляющей (рисунок 14).
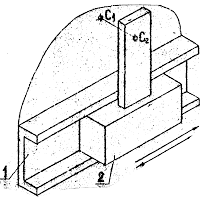
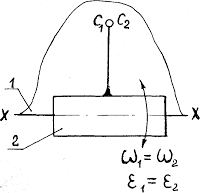

Если известен закон движения направляющей 1, то известны характеристики движения любой точки на этом звене, в том числе и точки С1, принадлежащей этой направляющей.
Движение точки С1 принимается в качестве переносного. Движение точки С2, принадлежащей ползуну, относительно точки С1 получается за счет поступательного движения ползуна вдоль направляющей (влияние вращательного движения исключается, т.к. радиус вращения равен нулю – положение точек С1 и С2 совпадает). При определении ускорений кроме относительного ускорения, направленного вдоль направляющей, возникает кориолисово ускорение (см. рисунок 14).
Исследование кинематики механизма методом планов начинается с начального механизма (с входного звена) и далее ведется по группам Ассура в порядке их присоединения к механизму. Для каждой группы Ассура разработаны методы решения (уравнения и порядок построения планов), которые являются неизменными, независимо от того, в каком механизме данная группа Ассура находится.
Уравнения планов для групп Ассура второго класса приведены в таблице 3.1.
Таблица 3.1 – Кинематический анализ групп Ассура II класса методом планов
Лекция 8. Тема: Построение планов скоростей и ускорений механизма, образованного группой Ассура 2–го класса 1–го вида.
Тема: Построение планов скоростей и ускорений механизма, образованного группой Ассура 2–го класса 1–го вида.
Построение плана скоростей
Планы скоростей и ускорений механизма строятся после решения задачи о его положении, причём построение планов проводится для отдельных групп Ассура, которые образовали механизм. Вначале строится план скоростей (ускорений) группы, которая присоединена элементами своих внешних кинематических пар к ведущему звену и стойке, затем строятся планы скоростей (ускорений) второй и т.д. групп, взятых в той же последовательности, в какой они присоединяются при образовании механизма.
Рассмотрим двухкривошипный шарнирный четырёхзвенник. Данные: lOA = 0.07 м, lOC = 0.04 м, lBC = 0.08 м, lAB = 0.075 м, lBD = 0.04, j1 = 30°, угловая скорость кривошипа OA постоянна и равна w1 = 15 c – 1 (рис. 1).
План положения механизма

Сначала строим план заданного положения механизма. Масштаб длин принимаем равным ml = 0.001 м /мм. Вычисляем длины отрезков, изображающие на чертеже звенья.
Для каждого положения механизма определяются скорости точек графическим методом. Вначале определяем скорость точки A, принадлежащей ведущему звену, которое вращается равномерно с постоянной угловой скоростью w1. Скорость этой точки по модулю равна

и направлена перпендикулярно оси звена OA в сторону вращения. Отложим от произвольной точки p, называемой полюсом плана скоростей, отрезок (pa). Длину отрезка (pa) выбираем равной (OA). (pa) = (OA) = 70 мм. Вычисляем масштабный коэффициент скоростей:

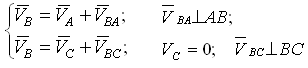
Строим план скоростей для группы звеньев 2 и 3. Оба звена совершают плоскопараллельное движение. Из теоретической механики известно, что скорость любой точки B плоской фигуры геометрически складывается из скорости какой-нибудь точки A, принятой за полюс, и скорости, которую точка B получает при вращении фигуры вокруг этого полюса.В этой группе звеньев все пары вращательные. Определяем скорость точки B по следующим двум векторным уравнениям:


Определяем скорость точки B: uB = (pb)×mu = 128×0.015 = 1.92 м/c.
Определяем скорость точки D: uD = (pd)×mu = 169×0.015 » 2.54 м/c.
Определяем угловую скорость звена AB:

План скоростей механизма
 |
Направление угловой скорости w2 звена AB может быть определено следующим образом. Мысленно прикладывая вектор  к точке B, видим, что вращение звена 2 вокруг оси шарнира A, принятой за полюс, совпадает с направлением вращения часовой стрелки. Отмечаем нужное направление вращения на звене 2 в виде дуговой стрелки.
к точке B, видим, что вращение звена 2 вокруг оси шарнира A, принятой за полюс, совпадает с направлением вращения часовой стрелки. Отмечаем нужное направление вращения на звене 2 в виде дуговой стрелки.
Определяем угловую скорость звена BC:

Направление угловой скорости w3 звена BC определяется таким же образом, как и w2. Мысленно прикладывая вектор  к точке B, видим, что вращение звена 3 вокруг оси шарнира C, принятой за полюс, совпадает с направлением вращения часовой стрелки. Отмечаем нужное направление вращения звена 3 дуговой стрелкой.
к точке B, видим, что вращение звена 3 вокруг оси шарнира C, принятой за полюс, совпадает с направлением вращения часовой стрелки. Отмечаем нужное направление вращения звена 3 дуговой стрелкой.
Построение плана ускорений
Ускорения точек находятся методом плана ускорений. Вначале определяем скорость точки A, принадлежащей ведущему звену, которое вращается равномерно с постоянной угловой скоростью w1. Полное ускорение точки A определяется по формуле  Так как e1 = 0, то тангенциальное ускорение a t A = 0. Тогда
Так как e1 = 0, то тангенциальное ускорение a t A = 0. Тогда  и ускорение точки A легко вычисляется: aA = w1 2 ×lOA. Затем строим план ускорений для группы звеньев 2 и 3. Так как движение этих звеньев плоское и все пары вращательные, то используем известную из теоретической механики теорему: ускорение любой точки B плоской фигуры геометрически складывается из ускорения какой-нибудь точки A, принятой за полюс, и ускорения, которое точка B получает при вращении фигуры вокруг этого полюса. Этот план строится по таким двум векторным уравнениям:
и ускорение точки A легко вычисляется: aA = w1 2 ×lOA. Затем строим план ускорений для группы звеньев 2 и 3. Так как движение этих звеньев плоское и все пары вращательные, то используем известную из теоретической механики теорему: ускорение любой точки B плоской фигуры геометрически складывается из ускорения какой-нибудь точки A, принятой за полюс, и ускорения, которое точка B получает при вращении фигуры вокруг этого полюса. Этот план строится по таким двум векторным уравнениям:

где  — полное ускорение точки A, равное нормальному ускорению
— полное ускорение точки A, равное нормальному ускорению  , так как звено 1 (кривошип) вращается равномерно и угловое ускорение равно нулю, следовательно равно нулю и тангенциальное ускорение
, так как звено 1 (кривошип) вращается равномерно и угловое ускорение равно нулю, следовательно равно нулю и тангенциальное ускорение  ,
,
и направленное параллельно линии OA от точки A к точке O (к центру кривизны траектории);
 — нормальное ускорение точки B во вращательном движении звена AB вокруг точки A, по модулю равное
— нормальное ускорение точки B во вращательном движении звена AB вокруг точки A, по модулю равное

и направленное параллельно линии AB от точки B к точке A (  );
);
 — тангенциальное ускорение точки B в том же движении звена AB, по модулю равное
— тангенциальное ускорение точки B в том же движении звена AB, по модулю равное
 — ускорение точки C, равное нулю, так как звено 4 неподвижно;
— ускорение точки C, равное нулю, так как звено 4 неподвижно;
 — нормальное ускорение точки B во вращательном движении звена BC вокруг точки C, по модулю равное
— нормальное ускорение точки B во вращательном движении звена BC вокруг точки C, по модулю равное

и направленное параллельно линии BC от точки B к точке C (  );
);
 — тангенциальное ускорение точки B в том же движении звена BC, по модулю равное
— тангенциальное ускорение точки B в том же движении звена BC, по модулю равное
Построение плана ускорений ведём в следующей последовательности. Строим решение первого векторного уравнения, указанного выше, для чего от полюса плана p откладываем отрезок (pa), изображающий ускорение , параллельно линии OA. Длину отрезка (pa) принимаем равной 70 мм, отчего масштаб ускорений будет

От точки a откладываем отрезок (anBA), изображающий ускорение . Длина отрезка (anBA) вычисляется так:

Через точку nBA проводим направление ускорения — линию, перпендикулярную линии AB. Переходим к построению решения второго векторного уравнения, указанного выше. Для этого от полюса плана p откладываем вектор ускорения , но оно равно нулю, поэтому точка c совпадает с точкой p. От точки p откладываем отрезок (pnBC), изображающий ускорение . Длина отрезка (pnBC) вычисляется так:


Соединив точку d с полюсом плана p, получаем отрезок (pd), изображающий абсолютное ускорение точки D.
Величины абсолютных ускорений точек B и D определяются так:
По правилу подобия найдём ускорения центров масс подвижных звеньев. Точки S1, S2 и S3 находятся на серединах соответствующих звеньев. На плане ускорений это будут векторы: (ps1), (ps2) и (ps3). Определяем абсолютные величины ускорений этих центров масс:
Величина углового ускорения звена AB равна:

Направление углового ускорения e2 звена 2 (звена AB) может быть определено следующим образом. Перенося мысленно вектор  в точку B, видим из точки A, что направление e2 совпадает с направлением вращения часовой стрелки. Обозначаем направление углового ускорения e2 на плане положения звена 2 дуговой стрелкой.
в точку B, видим из точки A, что направление e2 совпадает с направлением вращения часовой стрелки. Обозначаем направление углового ускорения e2 на плане положения звена 2 дуговой стрелкой.
Величина углового ускорения звена BC равна:

Направление углового ускорения e3 звена 3 (звена BC) может быть определено таким же образом, как и e2. Перенося мысленно вектор  в точку B, видим из точки C, что направление e3 совпадает с направлением вращения часовой стрелки. Обозначаем направление углового ускорения e3 на плане положения звена 3 дуговой стрелкой. План ускорений механизма приведён на рис. 3.
в точку B, видим из точки C, что направление e3 совпадает с направлением вращения часовой стрелки. Обозначаем направление углового ускорения e3 на плане положения звена 3 дуговой стрелкой. План ускорений механизма приведён на рис. 3.