
При работе в документах!моделях может возникнуть необходимость узнать расстояние
или угол между вершинами, кривыми, ребрами, осями, гранями и плоскостями. В КОМ!
ПАС!3D V8 возможно измерение различных геометрических характеристик, а также рас!
чет массо!инерционных характеристик модели (объема, массы, координат центра тяжес!
ти, осевых и центробежных моментов инерции).
Команды измерений сгруппированы в меню
Сервис, а кнопки для вызова
После вызова любой из команд измерения на экране появляется информационное
окно. Назначение этого окна, управление им, а также команды его меню описаны
в Томе II (раздел 67.1).
На Панели свойств после вызова любой из команд измерения появляется вкладка
мерение. На ней расположены элементы, позволяющие настроить параметры процесса
измерения. Эти элементы представлены в таблице 114.1.
114.1. Расстояние и угол
Чтобы определить расстояние и, если возможно, угол между двумя указанными объек!
тами, вызовите команду
Последовательно указывайте курсором пары объектов, расстояние и угол между кото!
рыми требуется измерить. Такими объектами могут являться вспомогательные оси и
плоскости, грани, ребра и вершины. Их можно указывать в любой комбинации (напри!
мер, плоскость и вершина, ребро и ось, две грани).
Система определяет значение расстояния между объектами (если оно не нулевое) и зна!
чение угла между ними (если объекты не параллельны и не перпендикулярны).
Если объекты пересекаются, параллельны или перпендикулярны, в Информационном
окне появляется соответствующее сообщение.
Табл. 114.1. Элементы управления параметрами измерений
Количество
знаков после
запятой
Список, управляющий точностью представления результатов
измерения. Минимальное количество знаков после запятой — 0,
максимальное — 10.
Единицы
измерения длины
Список, позволяющий выбрать единицы измерения длины:
миллиметры, сантиметры, дециметры, метры.
Единицы
измерения угла
Список, позволяющий выбрать единицы измерения углов: градусы,
радианы. Только для команды
Единицы
измерения массы
Список, позволяющий выбрать единицы измерения массы:
граммы, килограммы. Только для команды
Как в компасе рассчитать массу заготовки сделанной из стали?
![]()
Создаем трехмерную модель детали в Компас 3D. Затем правой кнопкой мыши нажимаем на неё. Видим следующее окошко:
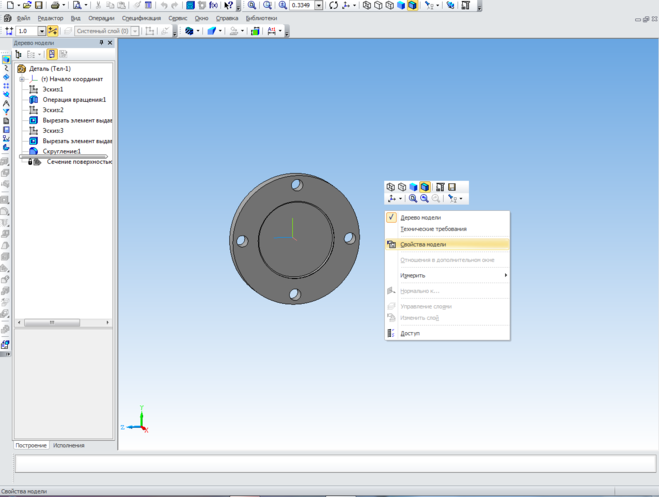
Нажимаем на «Свойства детали». Появляется информация о массе данной заготовки из стали, которую вы найдете без труда:
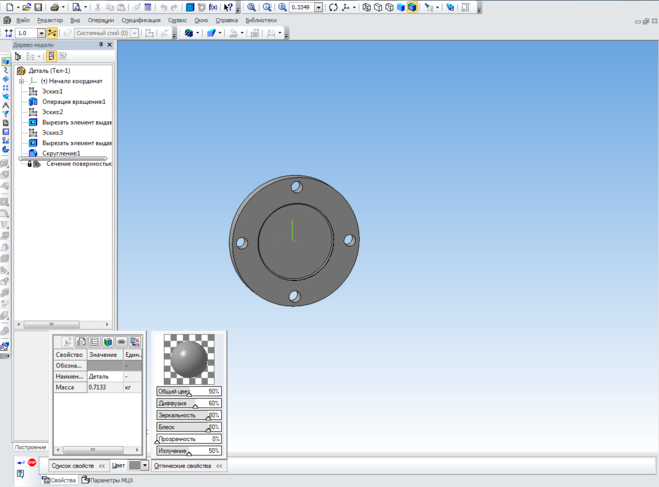
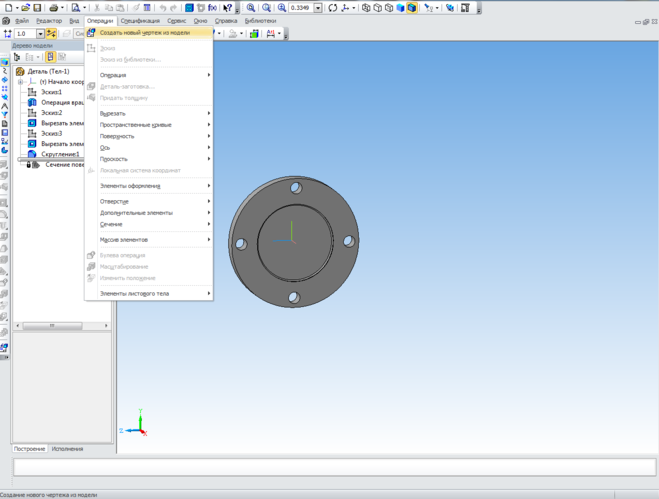
И тогда автоматически создастся чертеж, в основной надписи которого в графе «масса» будет указана величина.
![]()
![]()
Шероховатость в правом верхнем углу чертежа-называется «Неуказанная шероховатость». Она показывает шероховатость на тех поверхностях детали, на которых нет специального обозначения.
В программе Компас поставить «Неуказанную шероховатость» очень просто.
Если вы уже находитесь в подпрограмме «Чертеж», нужно найти вверху страницы надпись «Вставка».
Кликнуть на него левой мышкой, откроется Меню.
Найти в меню- «Неуказанная шероховатость».
Выбрать в окошечко знак, размер шероховатости, знак в скобках. Нажать ОК, и готово).
![]()
Неплохой видео урок по созданию наружной резьбы.
Данные приемы применяются для наглядности и придания натуральности изделию. Но не стоит или пользоваться, если потом вы решите преобразовать делать в чертеж или создать сборку. Для таких случаев лучше всего использовать условное обозначение резьбы.
![]()
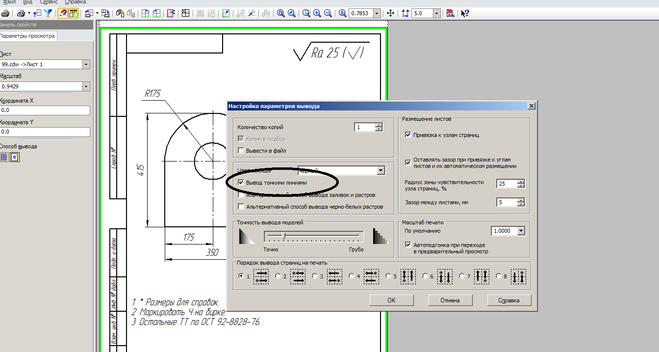
Существует несколько способов вставить чертёж (или другое содержимое) из Компаса в Ворд.
1 способ
1) Сначала нужно сохранить этот чертёж в графический файл.
Форматы, которые поддерживаются в Компасе: bmp, jpeg, png, gif, tiff.
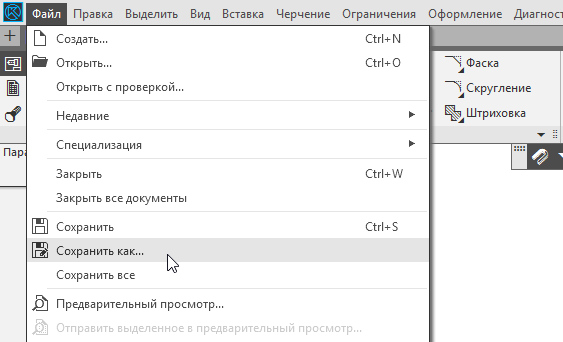
Для сохранения файла выберите в главном меню программы пункт «Сохранить как».
Укажите в специальном поле имя файла и в качестве типа файла выберите один из графических форматов (например, jpeg).
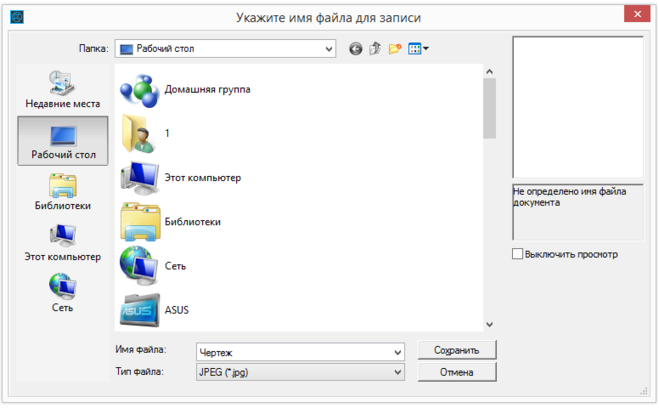
Затем нажмите на кнопку «Сохранить».
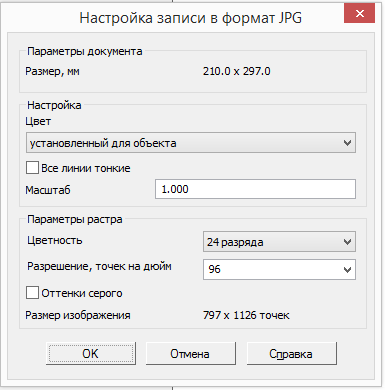
Дополнительно можно указать параметры сохранения (масштаб, разрешение и др.).
2) Перейдите в документ Ворд и поставьте курсор в то место, куда необходимо вставить чертёж.
На панели инструментов «Вставка» нажмите на «Рисунок».
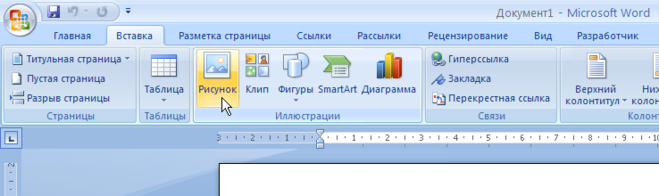
Теперь остаётся в открывшемся окне выбрать файл, который вы сохранили из Компаса, и нажать на кнопку «Вставить».
Чертёж появится в документе.
2 способ
Если требуется скопировать в Ворд какой-то отдельный фрагмент, то можно сделать скриншот экрана.
Удобнее всего это делать с помощью специальных программ, которые позволяют создавать скриншоты отдельной части экрана.
Например, я пользуюсь программой Lightshot (скачать её можно здесь).

3 способ
Если вам в дальнейшем может понадобиться отредактировать этот чертёж, то можно вставлять его не в виде картинки, а в виде специального объекта.
1) Сохраните всё в формате Компаса, то есть в формате cdw.

2) В Ворде на панели инструментов «Вставка» нажмите на «Объект».
Содержимое данного файла вставится в документ и будет доступным для редактирования (для редактирования нужно будет щёлкнуть 2 раза по чертежу, после чего он откроется в отдельном окне).
ТЕХНОЛОГИИ, ИНЖИНИРИНГ, ИННОВАЦИИ
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ

КОМПАС-3D и возможности анализа местоположения центра масс проектируемых изделий
 При проектировании машин и механизмов, перемещаемых в пространстве с помощью гидравлических или иных приводов, для контроля устойчивости проектируемого изделия мы используем возможности, которые нам предоставляет САПР. В ранее опубликованных материалах нами были в той или иной степени освещены некоторые приемы, которые использовались при разработке грузоподъемных машин. Тем не менее, хотелось бы более подробно изложить возможности оценки устойчивости проектируемого изделия при перемещении рабочих органов на примере достаточно простого сборочного узла.
При проектировании машин и механизмов, перемещаемых в пространстве с помощью гидравлических или иных приводов, для контроля устойчивости проектируемого изделия мы используем возможности, которые нам предоставляет САПР. В ранее опубликованных материалах нами были в той или иной степени освещены некоторые приемы, которые использовались при разработке грузоподъемных машин. Тем не менее, хотелось бы более подробно изложить возможности оценки устойчивости проектируемого изделия при перемещении рабочих органов на примере достаточно простого сборочного узла.
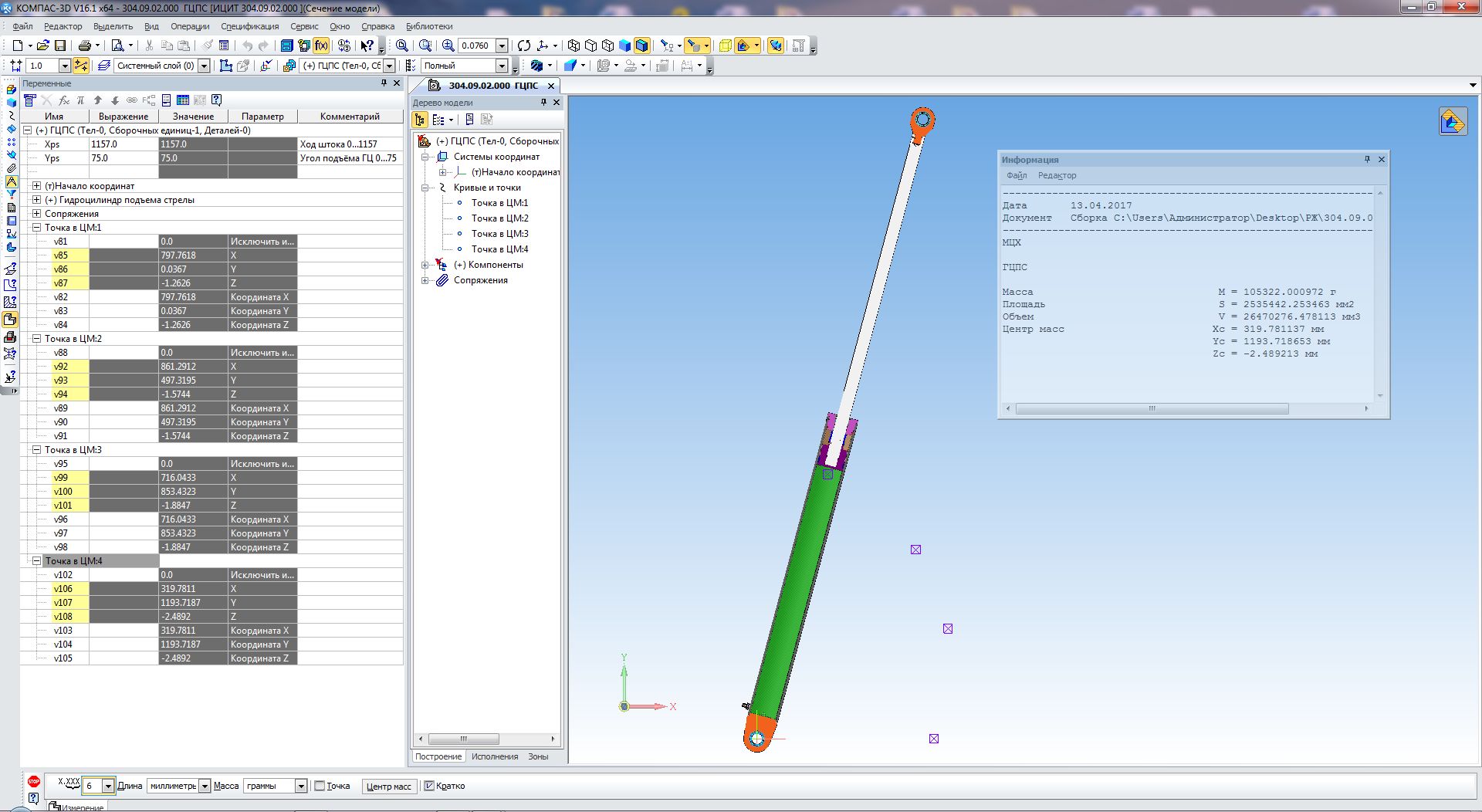
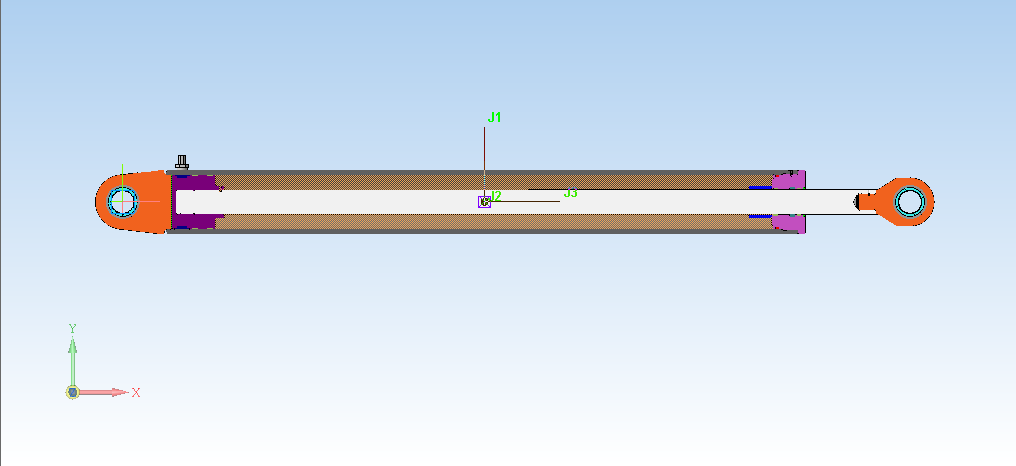
На рис. 1 представлена спроектированная в КОМПАС-3D параметрическая трехмерная модель гидроцилиндра подъема телескопической стрелы.

Нижняя часть гидроцилиндра закрепляется в проушинах подъемно-поворотного устройства, а верхняя – в проушинах основания нижнего колена стрелы. При выдвигании штока нижнее колено стрелы меняет свое положение относительно горизонта, тем самым перемещая вершину телескопической стрелы на необходимый для работы угол. Для более детального рассмотрения показанной на рис. 1 ситуации ниже представлены части этого рисунка отдельными фрагментами (рис. 2, 3, 4).
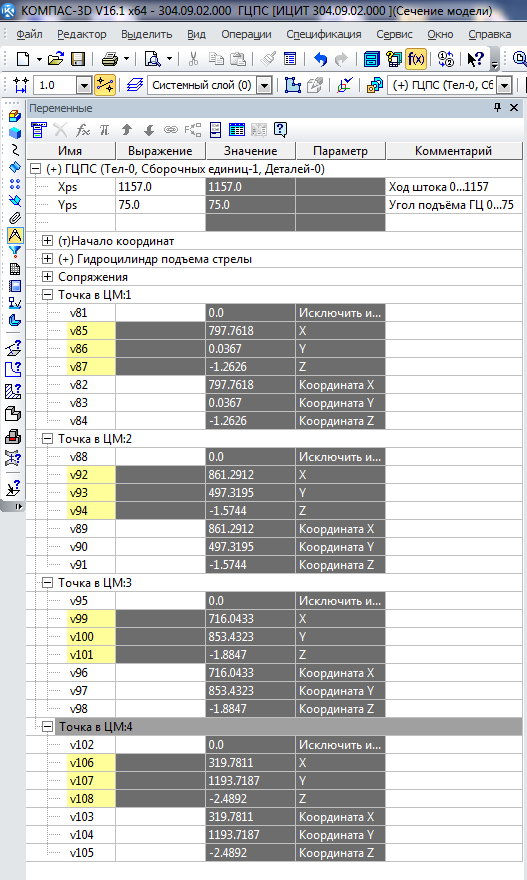
В таблице переменных параметрической трехмерной модели задаются длина выдвигания штока гидроцилиндра, угол его подъема, а также представляются результаты вычисления координат перемещаемого центра масс сборки. В качестве примера взяты четыре положения точки центра масс, полученные при перемещении компонентов гидроцилиндра в пространстве. Угол наклона гидроцилиндра определяется положением шарнирно соединенных частей рабочих органов грузоподъемной машины.
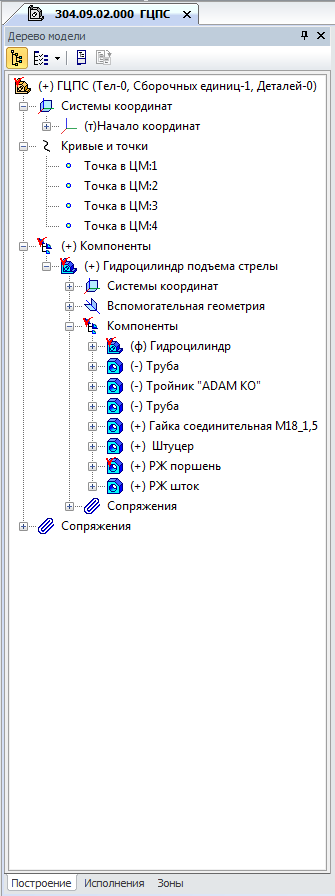
В дереве модели отражен состав сборки и порядок ее построения.
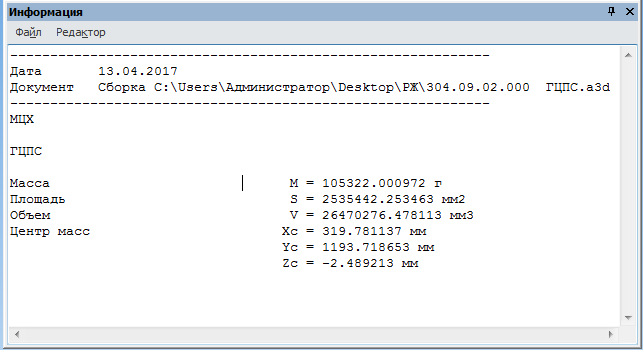
В таблице на рис. 4 показаны массо-центровочные параметры трехмерной модели в одном из положений, определяемым заданными параметрами в соответствующих строках таблицы переменных (рис. 2).
Далее на рисунках показаны фрагменты выбранных для демонстрации положений составных частей гидроцилиндра подъема телескопической стрелы при последовательном выдвигании штока.
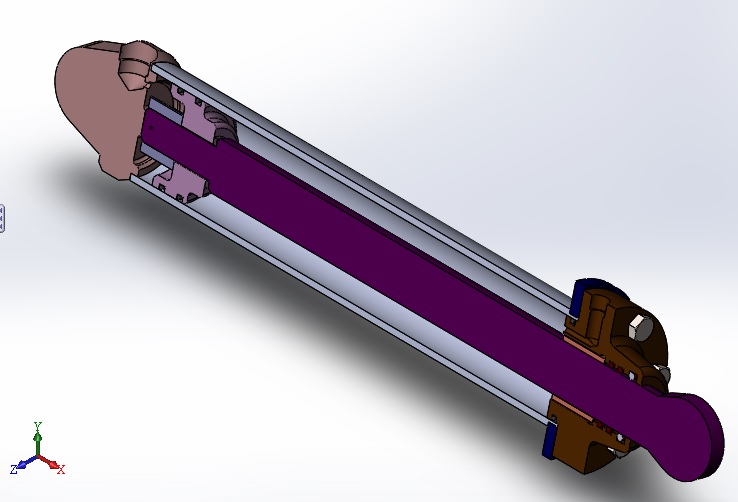
Следует заметить, что гидравлическая рабочая жидкость (РЖ), циркулирующая в гидроцилиндре, также присутствует в модели. Зеленым цветом она окрашена в поршневой полости, а коричневым — в штоковой полости. Рабочая жидкость при разных положениях поршня меняет свой объем, который также учитывается при определении МЦХ модели при заданной плотности имитируемого жидкого вещества. Учет перемещения РЖ при работе гидроцилиндра дает возможность более точно определить положение центра масс в точке расчета.
Рабочая жидкость горизонтально расположенного цилиндра имеется только в штоковой полости, гидроцилиндр сдвинут.
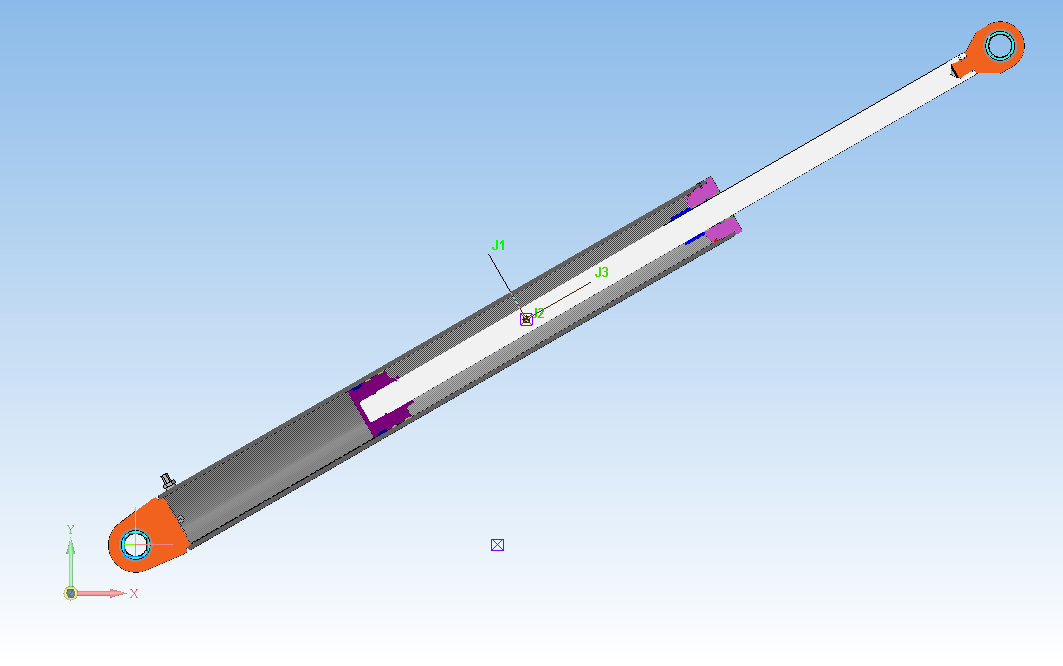
Рис. 6 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 30 градусов. РЖ присутствует в обеих полостях гидроцилиндра. Точками показаны положения центра масс настоящего и предыдущего положений.
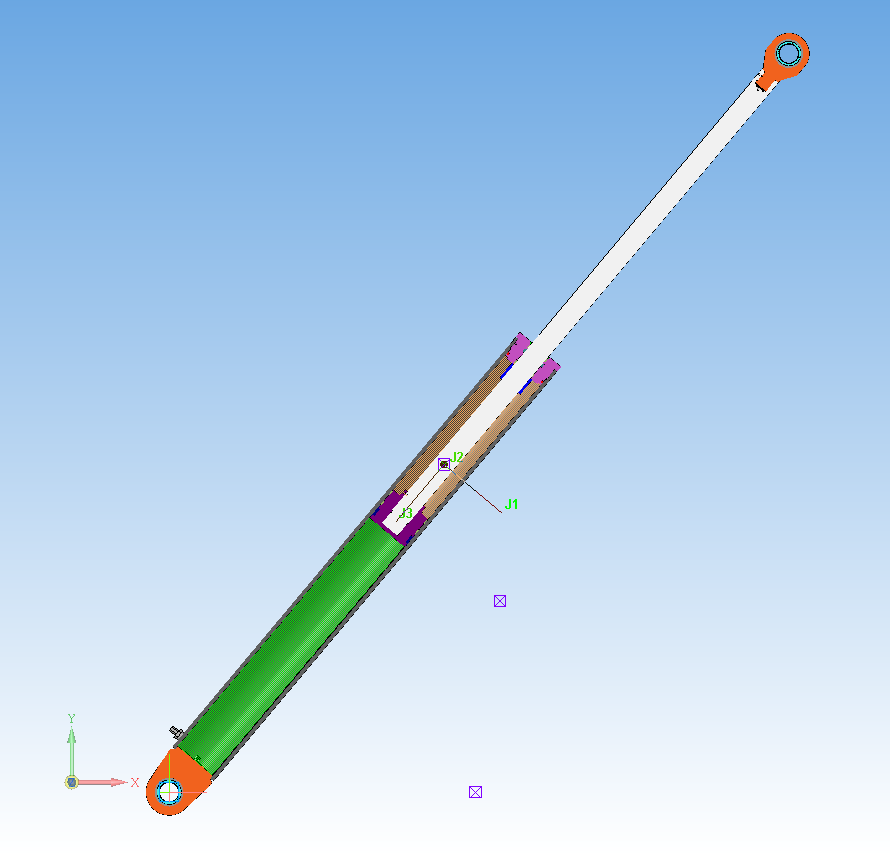
Рис. 7 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 50 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а больший ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
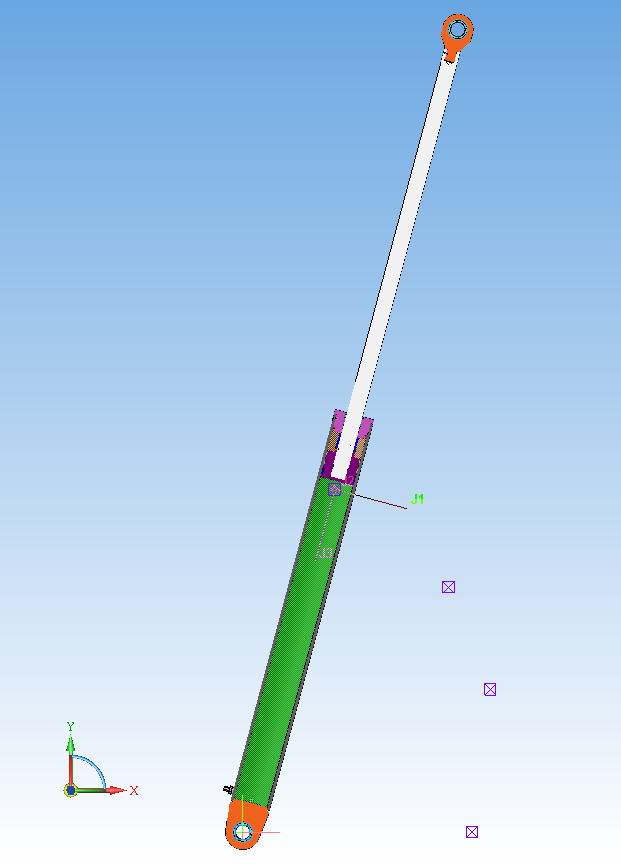
Рис. 8 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 75 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а почти весь ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
Имея большее количество точек положения центра масс гидроцилиндра, при необходимости, можно построить диаграмму перемещения этого центра масс. На примере приведенной трехмерной параметрической модели гидроцилиндра подъема телескопической стрелы грузоподъемной машины можно с достаточной точностью получить результат по перемещению центра масс при минимальных затратах времени. Кроме того, при наличии параметрической трехмерной модели всего изделия можно проследить перемещение центра масс при различных положениях рабочих органов на модели изделия. Таким образом, на этапе проектирования можно оценить грузовую устойчивость с использованием полной модели изделия в самых неблагоприятных положениях рабочих органов. Чтобы результаты, полученные с помощью трехмерной модели, были сравнимы с результатами натурных испытаний опытного образца, необходимо иметь достаточно насыщенную компонентами электронную модель изделия или лучше электронный двойник. Подобным образом мы учитываем перемещение центра масс на трехмерной модели телескопической стрелы с имитацией перемещения канатов выдвигания и сдвигания.
На практике наши специалисты довольны результатами, полученными в процессе применения методов предварительной оценки устойчивости всего разработанного ряда наших изделий с помощью параметрической ЭМИ.
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!

При работе в документах!моделях может возникнуть необходимость узнать расстояние
или угол между вершинами, кривыми, ребрами, осями, гранями и плоскостями. В КОМ!
ПАС!3D V8 возможно измерение различных геометрических характеристик, а также рас!
чет массо!инерционных характеристик модели (объема, массы, координат центра тяжес!
ти, осевых и центробежных моментов инерции).
Команды измерений сгруппированы в меню
Сервис, а кнопки для вызова
После вызова любой из команд измерения на экране появляется информационное
окно. Назначение этого окна, управление им, а также команды его меню описаны
в Томе II (раздел 67.1).
На Панели свойств после вызова любой из команд измерения появляется вкладка
мерение. На ней расположены элементы, позволяющие настроить параметры процесса
измерения. Эти элементы представлены в таблице 114.1.
114.1. Расстояние и угол
Чтобы определить расстояние и, если возможно, угол между двумя указанными объек!
тами, вызовите команду
Последовательно указывайте курсором пары объектов, расстояние и угол между кото!
рыми требуется измерить. Такими объектами могут являться вспомогательные оси и
плоскости, грани, ребра и вершины. Их можно указывать в любой комбинации (напри!
мер, плоскость и вершина, ребро и ось, две грани).
Система определяет значение расстояния между объектами (если оно не нулевое) и зна!
чение угла между ними (если объекты не параллельны и не перпендикулярны).
Если объекты пересекаются, параллельны или перпендикулярны, в Информационном
окне появляется соответствующее сообщение.
Табл. 114.1. Элементы управления параметрами измерений
Количество
знаков после
запятой
Список, управляющий точностью представления результатов
измерения. Минимальное количество знаков после запятой — 0,
максимальное — 10.
Единицы
измерения длины
Список, позволяющий выбрать единицы измерения длины:
миллиметры, сантиметры, дециметры, метры.
Единицы
измерения угла
Список, позволяющий выбрать единицы измерения углов: градусы,
радианы. Только для команды
Единицы
измерения массы
Список, позволяющий выбрать единицы измерения массы:
граммы, килограммы. Только для команды
Использование расчетных возможностей КОМПАС-3D для оценки положения центра масс сборочной единицы электронной модели изделия

При проектировании машин и механизмов, перемещаемых в пространстве с помощью гидравлических или иных приводов, для контроля устойчивости проектируемого изделия мы используем возможности, которые нам предоставляет САПР. В ранее опубликованных материалах нами были в той или иной степени освещены некоторые приемы, которые использовались при разработке грузоподъемных машин. Тем не менее, хотелось бы более подробно изложить возможности оценки устойчивости проектируемого изделия при перемещении рабочих органов на примере достаточно простого сборочного узла.
На рис. 1 представлена спроектированная в КОМПАС-3D параметрическая трехмерная модель гидроцилиндра подъема телескопической стрелы.
Нижняя часть гидроцилиндра закрепляется в проушинах подъемно-поворотного устройства, а верхняя – в проушинах основания нижнего колена стрелы. При выдвигании штока нижнее колено стрелы меняет свое положение относительно горизонта, тем самым перемещая вершину телескопической стрелы на необходимый для работы угол. Для более детального рассмотрения показанной на рис. 1 ситуации ниже представлены части этого рисунка отдельными фрагментами (рис. 2, 3, 4).
В таблице переменных параметрической трехмерной модели задаются длина выдвигания штока гидроцилиндра, угол его подъема, а также представляются результаты вычисления координат перемещаемого центра масс сборки. В качестве примера взяты четыре положения точки центра масс, полученные при перемещении компонентов гидроцилиндра в пространстве. Угол наклона гидроцилиндра определяется положением шарнирно соединенных частей рабочих органов грузоподъемной машины.
В дереве модели отражен состав сборки и порядок ее построения.
В таблице на рис. 4 показаны массо-центровочные параметры трехмерной модели в одном из положений, определяемым заданными параметрами в соответствующих строках таблицы переменных (рис. 2).
Далее на рисунках показаны фрагменты выбранных для демонстрации положений составных частей гидроцилиндра подъема телескопической стрелы при последовательном выдвигании штока.
Следует заметить, что гидравлическая рабочая жидкость (РЖ), циркулирующая в гидроцилиндре, также присутствует в модели. Зеленым цветом она окрашена в поршневой полости, а коричневым — в штоковой полости. Рабочая жидкость при разных положениях поршня меняет свой объем, который также учитывается при определении МЦХ модели при заданной плотности имитируемого жидкого вещества. Учет перемещения РЖ при работе гидроцилиндра дает возможность более точно определить положение центра масс в точке расчета.
Рабочая жидкость горизонтально расположенного цилиндра имеется только в штоковой полости, гидроцилиндр сдвинут.
Рис. 6 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 30 градусов. РЖ присутствует в обеих полостях гидроцилиндра. Точками показаны положения центра масс настоящего и предыдущего положений.
Рис. 7 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 50 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а больший ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
Рис. 8 показывает, что поршень гидроцилиндра сдвинут в сторону выдвигания, а угол относительно горизонта составляет 75 градусов. РЖ присутствует в обеих полостях гидроцилиндра, а почти весь ее объем находится в поршневой полости. Точками показаны положения центра масс настоящего и предыдущих положений.
Имея большее количество точек положения центра масс гидроцилиндра, при необходимости, можно построить диаграмму перемещения этого центра масс. На примере приведенной трехмерной параметрической модели гидроцилиндра подъема телескопической стрелы грузоподъемной машины можно с достаточной точностью получить результат по перемещению центра масс при минимальных затратах времени. Кроме того, при наличии параметрической трехмерной модели всего изделия можно проследить перемещение центра масс при различных положениях рабочих органов на модели изделия. Таким образом, на этапе проектирования можно оценить грузовую устойчивость с использованием полной модели изделия в самых неблагоприятных положениях рабочих органов. Чтобы результаты, полученные с помощью трехмерной модели, были сравнимы с результатами натурных испытаний опытного образца, необходимо иметь достаточно насыщенную компонентами электронную модель изделия или лучше электронный двойник. Подобным образом мы учитываем перемещение центра масс на трехмерной модели телескопической стрелы с имитацией перемещения канатов выдвигания и сдвигания.
На практике наши специалисты довольны результатами, полученными в процессе применения методов предварительной оценки устойчивости всего разработанного ряда наших изделий с помощью параметрической ЭМИ.
Материалы для иллюстраций подготовил О. А. Бесов, ведущий инженер ООО «Пожарные Системы»